- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄358907 > LP2975IMMX-5.0 (NATIONAL SEMICONDUCTOR CORP) MOSFET LDO Driver/Controller PDF資料下載
參數(shù)資料
| 型號(hào): | LP2975IMMX-5.0 |
| 廠商: | NATIONAL SEMICONDUCTOR CORP |
| 元件分類(lèi): | 模擬信號(hào)調(diào)理 |
| 英文描述: | MOSFET LDO Driver/Controller |
| 中文描述: | SPECIALTY ANALOG CIRCUIT, PDSO8 |
| 封裝: | MINI, SOP-8 |
| 文件頁(yè)數(shù): | 16/19頁(yè) |
| 文件大小: | 715K |
| 代理商: | LP2975IMMX-5.0 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)當(dāng)前第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)
Application Hints
(Continued)
To estimate the total phase margin, the individual phase shift
contributions of each pole and zero will be calculated assum-
ing f
= 200 Hz, f
z
= 5 kHz, f
zf
= 10 kHz, f
pf
= 40 kHz,
f
c
= 50 kHz, and f
pg
= 100 kHz:
Controller pole shift = 90
f
p
shift = arctan (50k/200) = 90
f
z
shift = arctan (50k/5k) = +84
f
zf
shift = arctan (50k/100k) = +79
f
pf
shift = arctan (50k/40k) = 51
f
pg
shift = arctan (50k/100k) = 27
Summing the six numbers, the estimate for the
total phase
shift is 95
, which corresponds to a
phase margin of 85
(a 27 improvement over the same application without the
feed-forward capacitor).
For this reason, a feed-forward capacitor is recommended in
all applications. Although not always required, the added
phase margin typically gives faster settling times and pro-
vides some design guard band against C
OUT
and ESR varia-
tions with temperature.
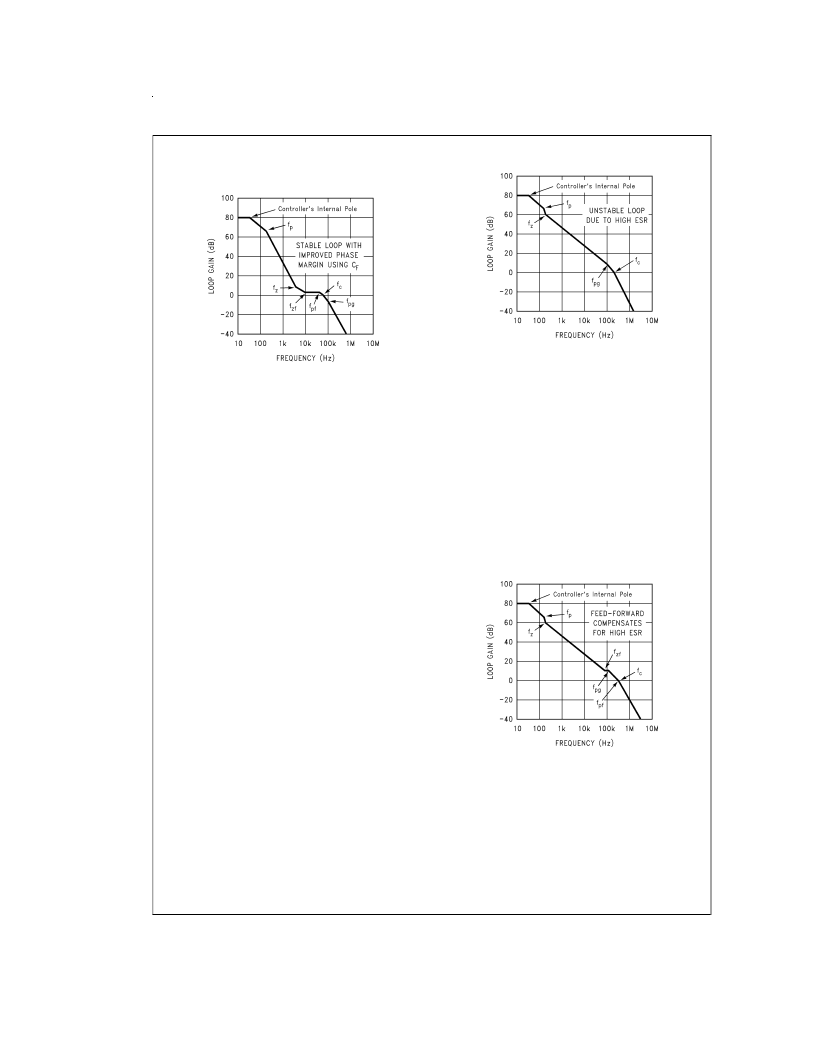
CAUSES AND CURES OF OSCILLATIONS
The most common cause of oscillations in an LDO applica-
tion is the output capacitor ESR. If the ESR is too high or too
low, the zero (f
z
) does not provide enough phase lead.
HIGH ESR
: To illustrate the effect of an output capacitor with
high ESR, the previous example will be repeated except that
the ESR will be
increased
by a factor of 20X. This will cause
the frequency of the zero f
to
decrease
by 20X, which
moves it from 5 kHz down to 250 Hz (see graph HIGH ESR
UNSTABLE WITHOUT FEED-FORWARD).
As shown, moving the location of f
lower in frequency ex-
tends the bandwidth, pushing the crossover frequency f
out
to about 200 kHz. In viewing the plot, it can be seen that f
p
and f
z
essentially cancel out, leaving only the controller pole
and f
. However, since f
now occurs well before f
, it will
cause enough phase shift to leave very little phase margin.
This application would either oscillate continuously or be
marginally stable (meaning it would exhibit severe ringing on
transient steps).
This can be improved by adding a feed-forward capacitor C
F
,
which adds a zero (f
) and a pole (f
) to the gain plot (see
graph HIGH ESR CORRECTED WITH FEED-FORWARD).
In this case, C
is selected to place f
at about the same fre-
quency as f
(essentially cancelling out the phase shift due
to f
). Assuming the added pole f
is near or beyond the f
c
frequency, it will add
<
45 of phase lag, leaving a phase
margin of
>
45 (adequate for good stability).
LOW ESR
: To illustrate how an output capacitor with low
ESR can cause an LDO regulator to oscillate, the same ex-
ample will be shown except that the ESR will be reduced suf-
ficiently to increase the original f
z
from 5 kHz to 50 kHz.
The plot now shows (see graph LOW ESR UNSTABLE
WITHOUT FEED-FORWARD) that the crossover frequency
f
has moved down to about 8 kHz. Since f
is 6X f
, it means
that the zero f
can only provide about 9 of phase lead at f
c
,
which is not sufficient for stability.
Improved Phase Margin with Feed-Forward
DS100034-28
High ESR Unstable without Feed-Forward
DS100034-29
High ESR Corrected with Feed-Forward
DS100034-31
www.national.com
16
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| LP2975AIMM-12 | MOSFET LDO Driver/Controller |
| LP2975IMM-12 | MOSFET LDO Driver/Controller |
| LP2975 | Quadruple 2-Input Exclusive-OR Gates 14-SOIC -40 to 85 |
| LP2978 | Micropower SOT, 50 mA Low-Noise Ultra Low-Dropout Regulator |
| LP2978AIM5-3.8 | Micropower SOT, 50 mA Low-Noise Ultra Low-Dropout Regulator |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| LP2978AY-3.8 WAF | 制造商:Texas Instruments 功能描述: |
| LP2978IM5-3.8 | 制造商:Rochester Electronics LLC 功能描述:50MA LDO REGULATOR, LOW-NOISE - Bulk 制造商:Texas Instruments 功能描述: |
| LP2978IM5X-3.8 | 制造商:Rochester Electronics LLC 功能描述:50MA LDO REGULATOR, LOW-NOISE - Bulk 制造商:Texas Instruments 功能描述: |
| LP2980-1.57BUP6 WAF | 制造商:Texas Instruments 功能描述: |
| LP2980-3.3BUP6 WAF | 制造商:Texas Instruments 功能描述: |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。