- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄25633 > MR80C32E-16SC (TEMIC SEMICONDUCTORS) 8-BIT, 16 MHz, MICROCONTROLLER, CQCC44 PDF資料下載
參數(shù)資料
| 型號(hào): | MR80C32E-16SC |
| 廠商: | TEMIC SEMICONDUCTORS |
| 元件分類(lèi): | 微控制器/微處理器 |
| 英文描述: | 8-BIT, 16 MHz, MICROCONTROLLER, CQCC44 |
| 文件頁(yè)數(shù): | 209/219頁(yè) |
| 文件大小: | 7896K |
| 代理商: | MR80C32E-16SC |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)第103頁(yè)第104頁(yè)第105頁(yè)第106頁(yè)第107頁(yè)第108頁(yè)第109頁(yè)第110頁(yè)第111頁(yè)第112頁(yè)第113頁(yè)第114頁(yè)第115頁(yè)第116頁(yè)第117頁(yè)第118頁(yè)第119頁(yè)第120頁(yè)第121頁(yè)第122頁(yè)第123頁(yè)第124頁(yè)第125頁(yè)第126頁(yè)第127頁(yè)第128頁(yè)第129頁(yè)第130頁(yè)第131頁(yè)第132頁(yè)第133頁(yè)第134頁(yè)第135頁(yè)第136頁(yè)第137頁(yè)第138頁(yè)第139頁(yè)第140頁(yè)第141頁(yè)第142頁(yè)第143頁(yè)第144頁(yè)第145頁(yè)第146頁(yè)第147頁(yè)第148頁(yè)第149頁(yè)第150頁(yè)第151頁(yè)第152頁(yè)第153頁(yè)第154頁(yè)第155頁(yè)第156頁(yè)第157頁(yè)第158頁(yè)第159頁(yè)第160頁(yè)第161頁(yè)第162頁(yè)第163頁(yè)第164頁(yè)第165頁(yè)第166頁(yè)第167頁(yè)第168頁(yè)第169頁(yè)第170頁(yè)第171頁(yè)第172頁(yè)第173頁(yè)第174頁(yè)第175頁(yè)第176頁(yè)第177頁(yè)第178頁(yè)第179頁(yè)第180頁(yè)第181頁(yè)第182頁(yè)第183頁(yè)第184頁(yè)第185頁(yè)第186頁(yè)第187頁(yè)第188頁(yè)第189頁(yè)第190頁(yè)第191頁(yè)第192頁(yè)第193頁(yè)第194頁(yè)第195頁(yè)第196頁(yè)第197頁(yè)第198頁(yè)第199頁(yè)第200頁(yè)第201頁(yè)第202頁(yè)第203頁(yè)第204頁(yè)第205頁(yè)第206頁(yè)第207頁(yè)第208頁(yè)當(dāng)前第209頁(yè)第210頁(yè)第211頁(yè)第212頁(yè)第213頁(yè)第214頁(yè)第215頁(yè)第216頁(yè)第217頁(yè)第218頁(yè)第219頁(yè)
88
ATmega8A [DATASHEET]
8159E–AVR–02/2013
compare matches between OCR1x and TCNT1. The OC1x Interrupt Flag will be set when a Compare Match
occurs.
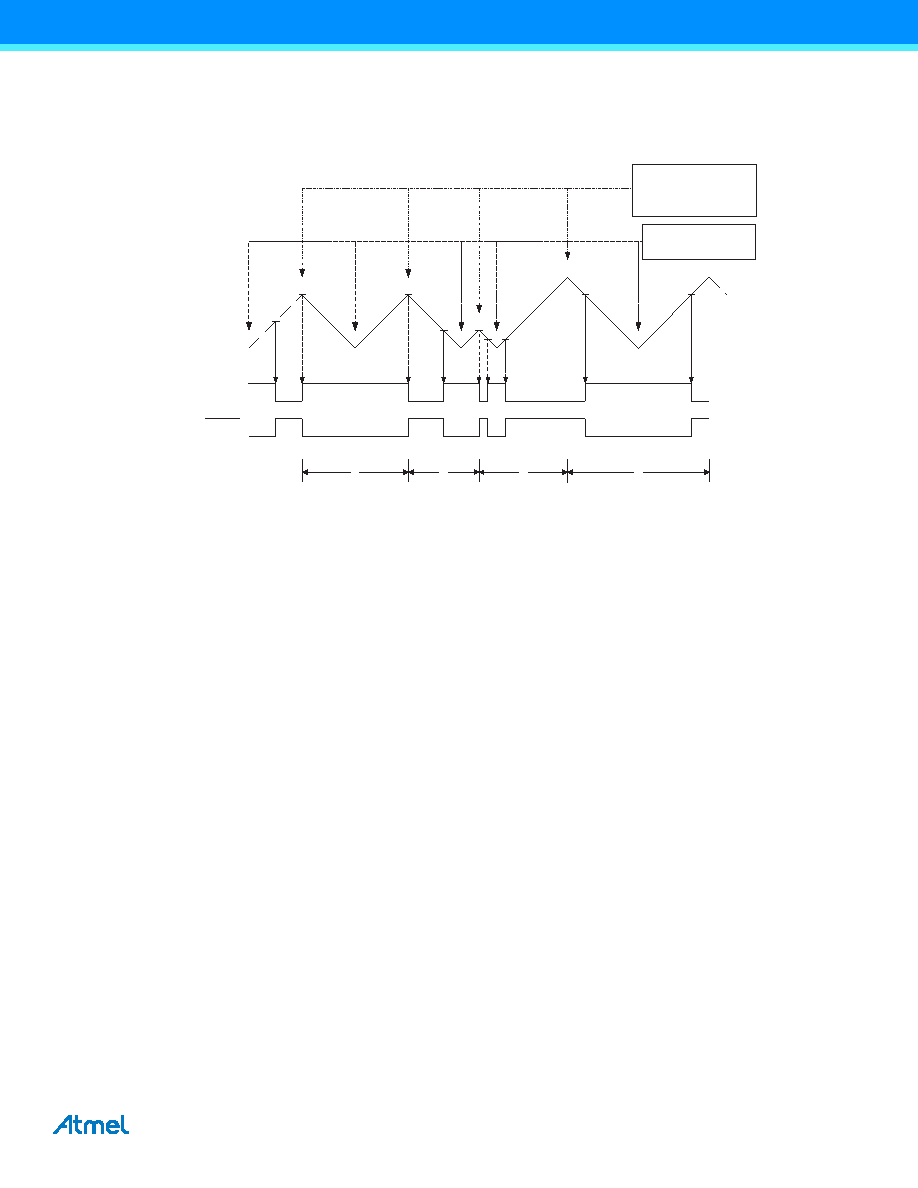
Figure 17-8. Phase Correct PWM Mode, Timing Diagram
The Timer/Counter Overflow Flag (TOV1) is set each time the counter reaches BOTTOM. When either OCR1A or
ICR1 is used for defining the TOP value, the OC1A or ICF1 Flag is set accordingly at the same timer clock cycle as
the OCR1x Registers are updated with the double buffer value (at TOP). The Interrupt Flags can be used to gener-
ate an interrupt each time the counter reaches the TOP or BOTTOM value.
When changing the TOP value the program must ensure that the new TOP value is higher or equal to the value of
all of the Compare Registers. If the TOP value is lower than any of the Compare Registers, a Compare Match will
never occur between the TCNT1 and the OCR1x. Note that when using fixed TOP values, the unused bits are
masked to zero when any of the OCR1x Registers are written. As the third period shown in Figure 17-8 illustrates,
changing the TOP actively while the Timer/Counter is running in the Phase Correct mode can result in an unsym-
metrical output. The reason for this can be found in the time of update of the OCR1x Register. Since the OCR1x
update occurs at TOP, the PWM period starts and ends at TOP. This implies that the length of the falling slope is
determined by the previous TOP value, while the length of the rising slope is determined by the new TOP value.
When these two values differ the two slopes of the period will differ in length. The difference in length gives the
unsymmetrical result on the output.
It is recommended to use the Phase and Frequency Correct mode instead of the Phase Correct mode when
changing the TOP value while the Timer/Counter is running. When using a static TOP value there are practically no
differences between the two modes of operation.
In phase correct PWM mode, the compare units allow generation of PWM waveforms on the OC1x pins. Setting
the COM1x1:0 bits to 2 will produce a non-inverted PWM and an inverted PWM output can be generated by setting
the COM1x1:0 to 3. See Table 17-4 on page 93. The actual OC1x value will only be visible on the port pin if the
data direction for the port pin is set as output (DDR_OC1x). The PWM waveform is generated by setting (or clear-
ing) the OC1x Register at the Compare Match between OCR1x and TCNT1 when the counter increments, and
clearing (or setting) the OC1x Register at Compare Match between OCR1x and TCNT1 when the counter decre-
ments. The PWM frequency for the output when using phase correct PWM can be calculated by the following
equation:
OCRnx / TOP Update and
OCnA Interrupt Flag Set
or ICFn Interrupt Flag Set
(Interrupt on TOP)
1
2
3
4
TOVn Interrupt Flag Set
(Interrupt on Bottom)
TCNTn
Period
OCnx
(COMnx1:0 = 2)
(COMnx1:0 = 3)
fOCnxPCPWM
f
clk_I/O
2
NTOP
----------------------------
=
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MQ80C52EXXX-20/883D | 8-BIT, MROM, 20 MHz, MICROCONTROLLER, CQFP44 |
| MR80C32E-16SHXXX:R | 8-BIT, 16 MHz, MICROCONTROLLER, CQCC44 |
| MQ80C52XXX-12SBR | 8-BIT, MROM, 12 MHz, MICROCONTROLLER, CQFP44 |
| MR80C32E-16P883D | 8-BIT, 16 MHz, MICROCONTROLLER, CQCC44 |
| MQ80C52XXX-16/883 | 8-BIT, MROM, 16 MHz, MICROCONTROLLER, CQFP44 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MR80C51BH | 制造商:ROCHESTER 制造商全稱(chēng):ROCHESTER 功能描述:CMOS SINGLE - CHIP 8-BIT MICROCOMPUTER 64K program Memory Space |
| MR80C86 | 制造商:INTERSIL 制造商全稱(chēng):Intersil Corporation 功能描述:CMOS 16-Bit Microprocessor |
| MR80C86/B | 制造商:Rochester Electronics LLC 功能描述:- Bulk 制造商:Harris Corporation 功能描述:Microprocessor, 16 Bit, 44 Pin, Ceramic, LCC |
| MR80C86-2 | 制造商:INTERSIL 制造商全稱(chēng):Intersil Corporation 功能描述:CMOS 16-Bit Microprocessor |
| MR80C86-2/883 | 制造商:Rochester Electronics LLC 功能描述:- Bulk |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。