- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄166228 > APW7066QAC-TRL (ANPEC ELECTRONICS CORP) Dual Synchronous Buck PWM Controllers and One Linear Controller PDF資料下載
參數(shù)資料
| 型號: | APW7066QAC-TRL |
| 廠商: | ANPEC ELECTRONICS CORP |
| 元件分類: | 穩(wěn)壓器 |
| 英文描述: | Dual Synchronous Buck PWM Controllers and One Linear Controller |
| 中文描述: | SWITCHING CONTROLLER, QCC32 |
| 封裝: | 5 X 5 MM, LEAD FREE, QFN-32 |
| 文件頁數(shù): | 18/33頁 |
| 文件大小: | 338K |
| 代理商: | APW7066QAC-TRL |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁當前第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁
Copyright
ANPEC Electronics Corp.
Rev. A.7 - Mar., 2008
APW7066
25
Application Information (Cont.)
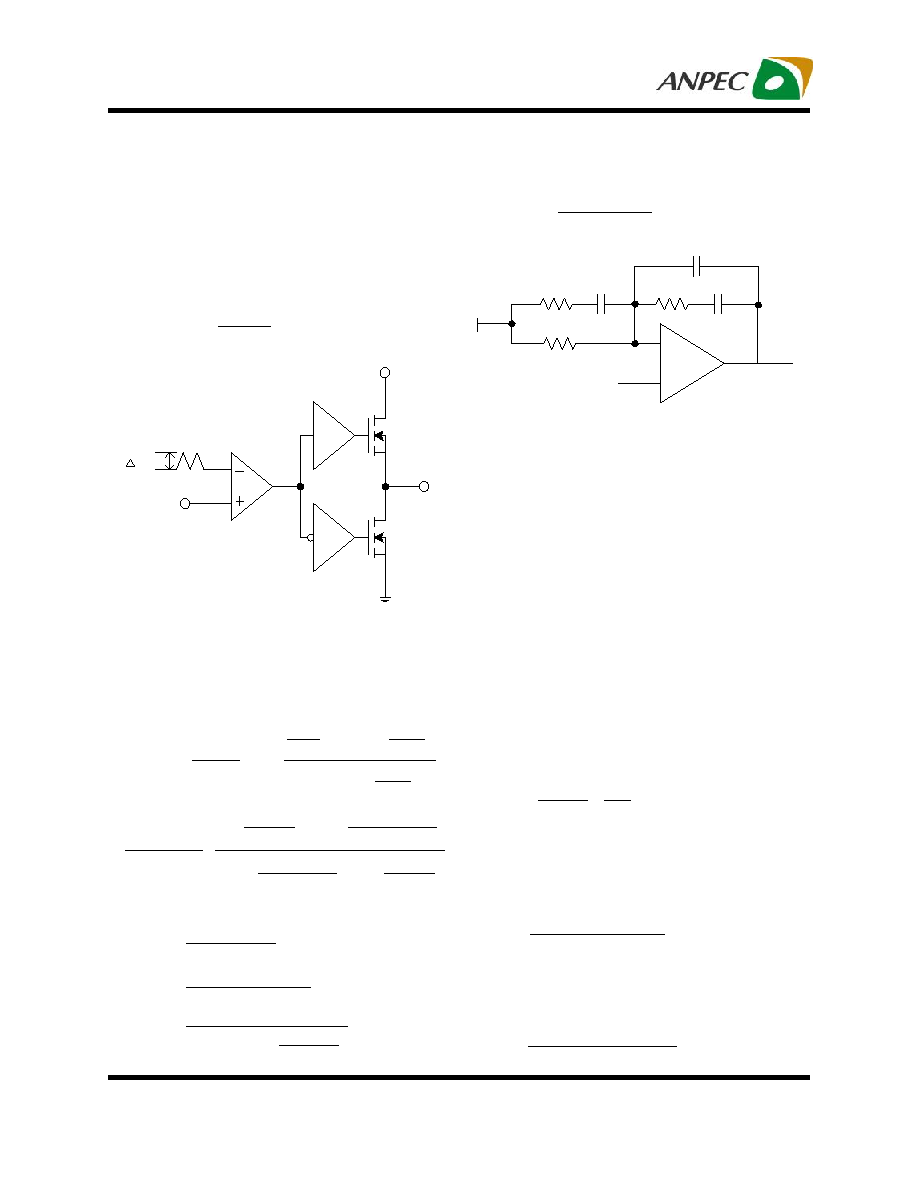
The PWM modulator is shown in Figure. 11. The input
is the output of the error amplifier and the output is the
PHASE node. The transfer function of the PWM
modulator is given by:
GAINPWM =
OSC
IN
V
PWM Compensation (Cont.)
VOSC
PWM
Comparator
Driver
Output of
Error
Amplifier
VIN
PHASE
Figure 11. The PWM Modulator
The compensation circuit is shown in Figure 12. It
provide a close loop transfer function with the highest
zero crossover frequency and sufficient phase margin.
The transfer function of error amplifier is given by:
GAINAMP =
+
+
sC3
1
R3
//
R1
sC2
1
R2
//
sC1
1
=
OUT
COMP
V
()
×
+
×
×
+
×
+
×
×
+
×
+
C3
R3
1
s
C2
C1
R2
C2
C1
s
C3
R3
R1
1
s
C2
R2
1
s
C1
R3
R1
R3
R1
The poles and zeros of the transfer function are:
FP2
=
C3
R3
2
1
×
π
×
FZ1
=
C2
R2
2
1
×
π
×
FZ2
=
() C3
R3
R1
2
1
×
+
×
π
×
Figure 12. Compensation Network
VCOMP
C2
VOUT
R3
VREF
C1
FB
-
+
C3
R2
R1
The closed loop gain of the converter can be written
as:
GAINLC x GAINPWM x GAINAMP
Figure 13. shows the asymptotic plot of the closed
loop converter gain and the following guidelines will
help to design the compensation network. Using the
below guidelines should give a compensation similar
to the curve plotted. A stable closed loop has a -20dB/
decade slope and a phase margin greater than 45
degree.
1.Choose a value for R1, usually between 1K and
5K.
2.Select the desired zero crossover frequency FO:
(1/5 ~ 1/10) x FS >FO>FESR
Use the following equation to calculate R2:
3.Place the first zero FZ1 before the output LC filter
double pole frequency FLC.
FZ1 = 0.75 x FLC
Calculate the C2 by the equation:
4.Set the pole at the ESR zero frequency FESR:
FP1 = FESR
Calculate the C1 by the equation:
1
R
F
V
R2
LC
O
IN
OSC
×
=
0.75
F
R2
2
1
C2
LC
×
π
×
=
1
F
C2
R2
C2
C1
ESR
×
π
×
=
2
FP1
=
+
×
π
×
C2
C1
C2
C1
R2
2
1
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| AQ1058N2J-T | 1 ELEMENT, 0.0082 uH, FERRITE-CORE, GENERAL PURPOSE INDUCTOR, SMD |
| AQ1053N3S-T | 1 ELEMENT, 0.0033 uH, FERRITE-CORE, GENERAL PURPOSE INDUCTOR, SMD |
| AQ1052N2S-T | 1 ELEMENT, 0.0022 uH, FERRITE-CORE, GENERAL PURPOSE INDUCTOR, SMD |
| AQ10512NJ-T | 1 ELEMENT, 0.012 uH, FERRITE-CORE, GENERAL PURPOSE INDUCTOR, SMD |
| AQ1059N1J-T | 1 ELEMENT, 0.0091 uH, FERRITE-CORE, GENERAL PURPOSE INDUCTOR, SMD |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| APW7066QAC-TU | 制造商:ANPEC 制造商全稱:Anpec Electronics Coropration 功能描述:Dual Synchronous Buck PWM Controllers and One Linear Controller |
| APW7066QAC-TUL | 制造商:ANPEC 制造商全稱:Anpec Electronics Coropration 功能描述:Dual Synchronous Buck PWM Controllers and One Linear Controller |
| APW7066RC-TR | 制造商:ANPEC 制造商全稱:Anpec Electronics Coropration 功能描述:Dual Synchronous Buck PWM Controllers and One Linear Controller |
| APW7066RC-TRG | 制造商:ANPEC 制造商全稱:Anpec Electronics Coropration 功能描述:Dual Synchronous Buck PWM Controllers and One Linear Controller |
| APW7066RC-TRL | 制造商:ANPEC 制造商全稱:Anpec Electronics Coropration 功能描述:Dual Synchronous Buck PWM Controllers and One Linear Controller |
發(fā)布緊急采購,3分鐘左右您將得到回復。