- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄366649 > CAME-PXB4360 10A SCRS PDF資料下載
參數(shù)資料
| 型號(hào): | CAME-PXB4360 |
| 英文描述: | 10A SCRS |
| 中文描述: | 內(nèi)容可尋址存儲(chǔ)器單元 |
| 文件頁(yè)數(shù): | 46/66頁(yè) |
| 文件大?。?/td> | 869K |
| 代理商: | CAME-PXB4360 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)當(dāng)前第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)
3;%)
Data Sheet
6-46
07.2000
,QWHUIDFH'HVFULSWLRQ
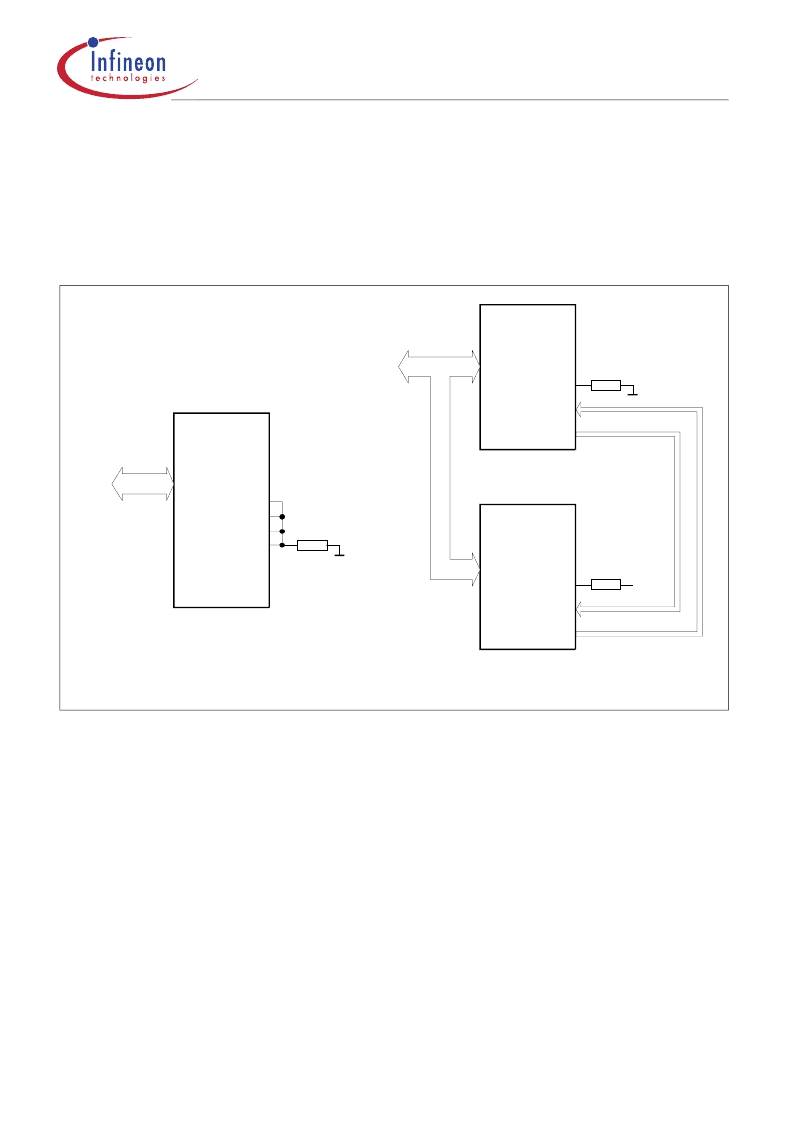
&DVFDGH,QWHUIDFH
For more demanding applications, two CAME chips can be cascaded to build up one virtual
device with double capacity and the identical physical bus interface to an external controller. The
Cascade Interface is used for this purpose and consists of the CO(2..0) outputs and the CI(2..0)
and CA inputs as shown in
ILJXUH
.
)LJXUH
&DVFDGH,QWHUIDFH,QWHUFRQQHFWLRQRI&$0(&KLSV
Both CAME chips receive the same requests from ALP. Depending on the request, the
determination of which chip may answer at the end of the request is either known in advance
(read, write and test requests #4..6) or results from the operation (search requests #1..3). In the
second case, the master must inform the slave of its search result and indicate whether or not it
processes the search request. The same report takes place from the slave to the master. This
is done with the signals CO(1..0). Processing the crosswise transferred status information is
done according to
WDEOH
. The timing of this transfer is defined in
WDEOH
the CO(1..0) signals at this time is done according to
WDEOH
.
In order to avoid bus conflicts on reading of cascaded CAME chips, the master has the
opportunity to disable data output of the slave CAME using the CO(2) signal. This signal is
important in case of a parity error, for example.
The CO(2..0) outputs must be connected to the CI(2..0) inputs of the opposite CAME.
. The interpretation of
1k
CAME
CA
CI(0)
CI(1)
CI(2)
CO(0)
CO(1)
CO(2)
ALP
Bus
interface
CAME
(Master)
CA
CI(2:0)
CO(2:0)
1k
GND
GND
Bus
interface
ALP
CAME
(Slave)
CA
CI(2:0)
CO(2:0)
10k
+ 3.3 V
Bus
interface
a) Single CAME application
a) 2 CAME application
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| CAMELIA | Camelia C1 LV 8M/CL 8M Preliminary [Updated 04/03. 36 Pages] Area Array Color CCD. 3500 x 2300. 12-bit. 2.7 F/s |
| CAMFACT | 12A SCRS |
| CAMMINI | 25A SCRS |
| CAN | 8A SCRS |
| CAP2405F | 12A SCRS |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| CAMERA-CBL-ROBOT-STD-MIN-3M | 功能描述:電纜組件 STD cameralink cable, MDR-HDR, Robot type 3 meter RoHS:否 制造商:Molex 產(chǎn)品:Power Assemblies 類型:Cable Assembly 連接器端口 A:No Connector 連接器端口 A 管腳計(jì)數(shù):4 連接器端口 B:No Connector 連接器端口 B 管腳計(jì)數(shù): 型式:Male 線規(guī) - 美國(guó)線規(guī)(AWG):20, 28 長(zhǎng)度:0.305 m 顏色:Black, Red |
| CAMERA-CBL-ROBOT-STD-MIN-7M | 功能描述:電纜組件 STD cameralink cable, MDR-HDR, Robot type 7 meter RoHS:否 制造商:Molex 產(chǎn)品:Power Assemblies 類型:Cable Assembly 連接器端口 A:No Connector 連接器端口 A 管腳計(jì)數(shù):4 連接器端口 B:No Connector 連接器端口 B 管腳計(jì)數(shù): 型式:Male 線規(guī) - 美國(guó)線規(guī)(AWG):20, 28 長(zhǎng)度:0.305 m 顏色:Black, Red |
| CAMERA-CBL-ROBOT-STD-STD-10M | 功能描述:電纜組件 STD cameralink cable, MDR-MDR, Robot type 10 meter RoHS:否 制造商:Molex 產(chǎn)品:Power Assemblies 類型:Cable Assembly 連接器端口 A:No Connector 連接器端口 A 管腳計(jì)數(shù):4 連接器端口 B:No Connector 連接器端口 B 管腳計(jì)數(shù): 型式:Male 線規(guī) - 美國(guó)線規(guī)(AWG):20, 28 長(zhǎng)度:0.305 m 顏色:Black, Red |
| CAMERA-CBL-ROBOT-STD-STD-3M | 功能描述:電纜組件 STD cameralink cable, MDR-MDR, Robot type 3 meter RoHS:否 制造商:Molex 產(chǎn)品:Power Assemblies 類型:Cable Assembly 連接器端口 A:No Connector 連接器端口 A 管腳計(jì)數(shù):4 連接器端口 B:No Connector 連接器端口 B 管腳計(jì)數(shù): 型式:Male 線規(guī) - 美國(guó)線規(guī)(AWG):20, 28 長(zhǎng)度:0.305 m 顏色:Black, Red |
| CAM-F550 | 功能描述:電池組 7.2V 1550mAh RoHS:否 制造商:Ultralife 電池大小: 電池?cái)?shù)量: 輸出電壓:3.7 V 容量: 化學(xué)性質(zhì):Lithium 端接類型:Wire |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。