- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄370462 > HD404448 (Hitachi,Ltd.) 4-bit HMCS400-Series microcomputer(4位單片微計(jì)算機(jī)) PDF資料下載
參數(shù)資料
| 型號(hào): | HD404448 |
| 廠商: | Hitachi,Ltd. |
| 英文描述: | 4-bit HMCS400-Series microcomputer(4位單片微計(jì)算機(jī)) |
| 中文描述: | 4位HMCS400系列微機(jī)(4位單片微計(jì)算機(jī)) |
| 文件頁(yè)數(shù): | 31/123頁(yè) |
| 文件大?。?/td> | 726K |
| 代理商: | HD404448 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)當(dāng)前第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)第103頁(yè)第104頁(yè)第105頁(yè)第106頁(yè)第107頁(yè)第108頁(yè)第109頁(yè)第110頁(yè)第111頁(yè)第112頁(yè)第113頁(yè)第114頁(yè)第115頁(yè)第116頁(yè)第117頁(yè)第118頁(yè)第119頁(yè)第120頁(yè)第121頁(yè)第122頁(yè)第123頁(yè)
HD404449 Series
31
Stop Mode:
In stop mode, all MCU operations stop and RAM data is retained. Therefore, the power
dissipation in this mode is the least of all modes. The OSC
1
and OSC
2
oscillator stops. Operation of the
X1 and X2 oscillator can be selected by setting bit 3 of the system clock select register (SSR: $029;
operating: SSR3 = 0, stop: SSR3 = 1) (figure 26). The MCU enters stop mode if the STOP instruction is
executed in active mode when bit 3 of timer mode register A (TMA: $008) is set to 0 (TMA3 = 0) (figure
41).
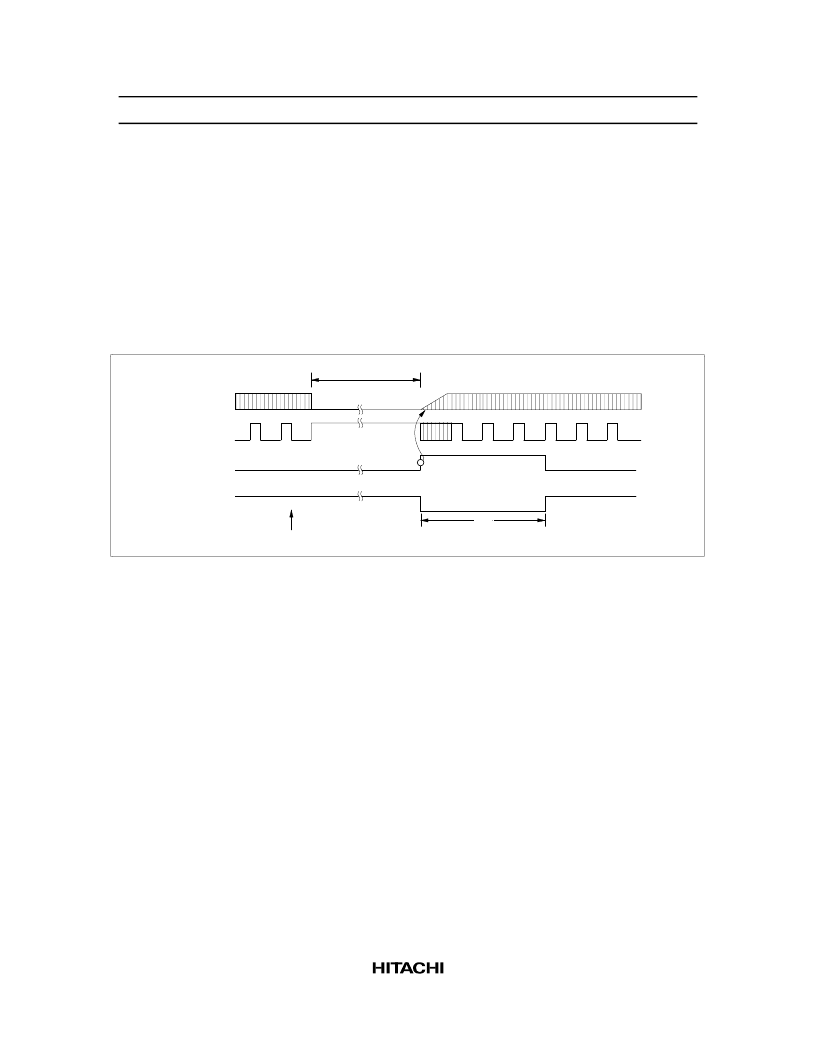
Stop mode is terminated by a RESET input or a
STOPC
input as shown in figure 16. RESET or
STOPC
must be applied for at least one t
RC
to stabilize oscillation (refer to the AC Characteristics section). When
the MCU restarts after stop mode is cancelled, all RAM contents before entering stop mode are retained,
but the accuracy of the contents of the accumulator, B register, W register, X/SPX register, Y/SPY register,
carry flag, and serial data register cannot be guaranteed.
Stop mode
Oscillator
Internal
clock
STOP instruction execution
t
res
≥
t
RC
(stabilization period)
t
res
RESET
STOPC
Figure 16 Timing of Stop Mode Cancellation
Watch Mode:
In watch mode, the clock function (timer A) using the X1 and X2 oscillator operates but
other function operations stop. Therefore, the power dissipation in this mode is the second least to stop
mode, and this mode is convenient when only clock display is used. In this mode, the OSC
1
and OSC
2
oscillator stops, but the X1 and X2 oscillator operates. The MCU enters watch mode if the STOP
instruction is executed in active mode when TMA3 = 1, or if the STOP or SBY instruction is executed in
subactive mode.
Watch mode is terminated by a RESET input or a timer-A/
INT
0
interrupt request. For details of RESET
input, refer to the Stop Mode section. When terminated by a timer-A/
INT
0
interrupt request, the MCU
enters active mode if LSON is 0, or subactive mode if LSON is 1. After an interrupt request is generated,
the time required to enter active mode is t
RC
for a timer A interrupt, and T
X
(where T + t
RC
< T
X
< 2T + t
RC
)
for an
INT
0
interrupt, as shown in figure 17.
Operation during mode transition is the same as that at standby mode cancellation (figure 15).
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| HD404449 | 4-bit HMCS400-Series microcomputer(4位單片微計(jì)算機(jī)) |
| HD4074459 | 4-bit HMCS400-Series microcomputer(4位單片微計(jì)算機(jī)) |
| HD404458 | 4-bit HMCS400-Series microcomputer(4位單片微計(jì)算機(jī)) |
| HD404459 | 4-bit HMCS400-Series microcomputer(4位單片微計(jì)算機(jī)) |
| HD40A4052 | 4-Bit Single-Chip Microcomputer(4位單片微計(jì)算機(jī)) |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| HD404448H | 制造商:HITACHI 制造商全稱:Hitachi Semiconductor 功能描述:HD404449 SERIES |
| HD404448TF | 制造商:HITACHI 制造商全稱:Hitachi Semiconductor 功能描述:HD404449 SERIES |
| HD404449 | 制造商:HITACHI 制造商全稱:Hitachi Semiconductor 功能描述:HD404449 SERIES |
| HD404449H | 制造商:HITACHI 制造商全稱:Hitachi Semiconductor 功能描述:HD404449 SERIES |
| HD404449SERIES | 制造商:未知廠家 制造商全稱:未知廠家 功能描述: |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。