- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄69003 > L6229QTR (STMICROELECTRONICS) BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, QCC32 PDF資料下載
參數(shù)資料
| 型號: | L6229QTR |
| 廠商: | STMICROELECTRONICS |
| 元件分類: | 運(yùn)動控制電子 |
| 英文描述: | BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, QCC32 |
| 封裝: | 5 X 5 MM, 1 MM HEIGHT, 0.50 MM PITCH, ROHS COMPLIANT, VFQFPN-32 |
| 文件頁數(shù): | 8/28頁 |
| 文件大小: | 521K |
| 代理商: | L6229QTR |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁當(dāng)前第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁
Circuit description
L6229Q
16/28
Doc ID 15209 Rev 3
5.4
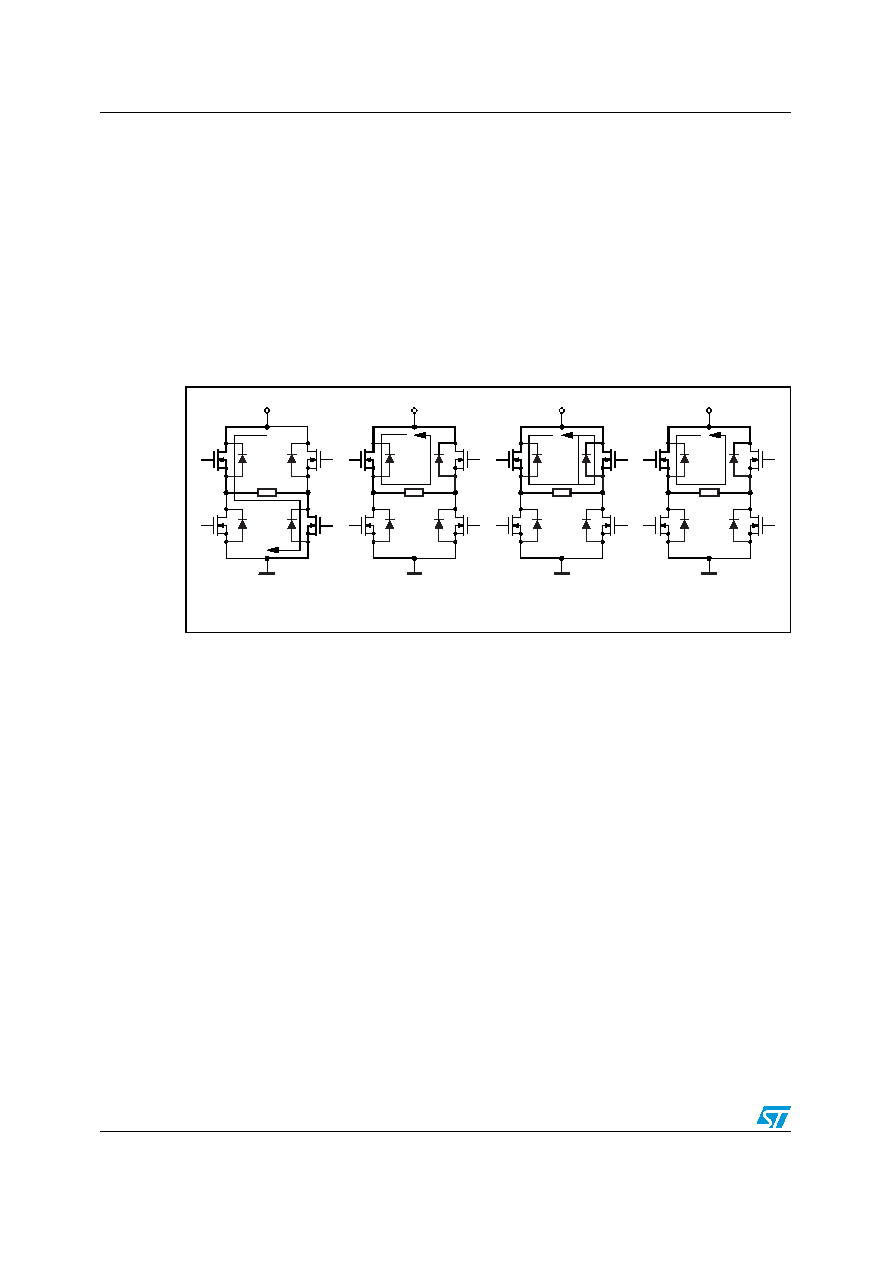
Slow decay mode
Figure 13 shows the operation of the bridge in the slow decay mode during the off time. At
any time only two legs of the three-phase bridge are active, therefore only the two active
legs of the bridge are shown in the figure and the third leg will be off. At the start of the Off
Time, the lower power MOS is switched off and the current recirculates around the upper
half of the bridge. Since the voltage across the coil is low, the current decays slowly. After
the dead time the upper power MOS is operated in the synchronous rectification mode
reducing the impedance of the freewheeling diode and the related conducting losses. When
the monostable times out, upper MOS that was operating the synchronous mode turns off
and the lower power MOS is turned on again after some delay set by the dead time to
prevent cross conduction.
Figure 13.
Slow decay mode output stage configurations
5.5
Decoding logic
The decoding logic section is a combinatory logic that provides the appropriate driving of the
three-phase bridge outputs according to the signals coming from the three hall sensors that
detect rotor position in a 3-phase BLDC motor. This novel combinatory logic discriminates
between the actual sensor positions for sensors spaced at 60, 120, 240 and 300 electrical
degrees. This decoding method allows the implementation of a universal IC without
dedicating pins to select the sensor configuration.
There are eight possible input combinations for three sensor inputs. Six combinations are
valid for rotor positions with 120 electrical degrees sensor phasing (see Figure 14, positions
1, 2, 3a, 4, 5 and 6a) and six combinations are valid for rotor positions with 60 electrical
degrees phasing (see Figure 15, positions 1, 2, 3b, 4, 5 and 6b). Four of them are in
common (1, 2, 4 and 5) whereas there are two combinations used only in 120 electrical
degrees sensor phasing (3a and 6a) and two combinations used only in 60 electrical
degrees sensor phasing (3b and 6b).
The decoder can drive motors with different sensor configuration simply by following the
OUT2 and OUT3). The output configuration 3a is the same than 3b and analogously output
configuration 6a is the same than 6b.
The sequence of the Hall codes for 300 electrical degrees phasing is the reverse of 60 and
the sequence of the Hall codes for 240 phasing is the reverse of 120. So, by decoding the 60
A) ON TIME
B) 1
μs DEAD TIME
C) SYNCHRONOUS
RECTIFICATION
D) 1
μs DEAD TIME
D01IN1336
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| L6229Q | BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, QCC32 |
| L6230PDTR | BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, PDSO36 |
| L6230PD | BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, PDSO36 |
| L6260 | DISK DRIVE MOTOR CONTROLLER, 1.5 A, PQFP64 |
| L6561I | 0.7 A POWER FACTOR CONTROLLER, PDIP8 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| L622C | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:THYRISTOR MODULE|BRIDGE|HALF-CNTLD|CA|240V V(RRM)|46A I(T) |
| L622-DBC | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:L series PRTDs, type L 622 DBC are designed for large volume applications where longterm stability |
| L622DY | 制造商:VCC 功能描述:LED CIRCUIT BOARD INDICATOR |
| L622F | 功能描述:分立半導(dǎo)體模塊 SCR/DIODE MODULE 240VAC 42.5ADC 600VP RoHS:否 制造商:Infineon Technologies 產(chǎn)品:Thyristor Power Modules 類型:Phase Controls 安裝風(fēng)格:Screw 封裝 / 箱體:DT61 封裝: |
| L622F-8680 | 制造商:Crydom 功能描述: |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。