- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄359155 > MCZ33977EG (飛思卡爾半導體(中國)有限公司) Single Gauge Driver PDF資料下載
參數(shù)資料
| 型號: | MCZ33977EG |
| 廠商: | 飛思卡爾半導體(中國)有限公司 |
| 英文描述: | Single Gauge Driver |
| 中文描述: | 單表驅(qū)動 |
| 文件頁數(shù): | 17/37頁 |
| 文件大小: | 402K |
| 代理商: | MCZ33977EG |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁當前第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁
Analog Integrated Circuit Device Data
Freescale Semiconductor
17
33977
FUNCTIONAL DEVICE OPERATION
OPERATIONAL MODES
POINTER DECELERATION
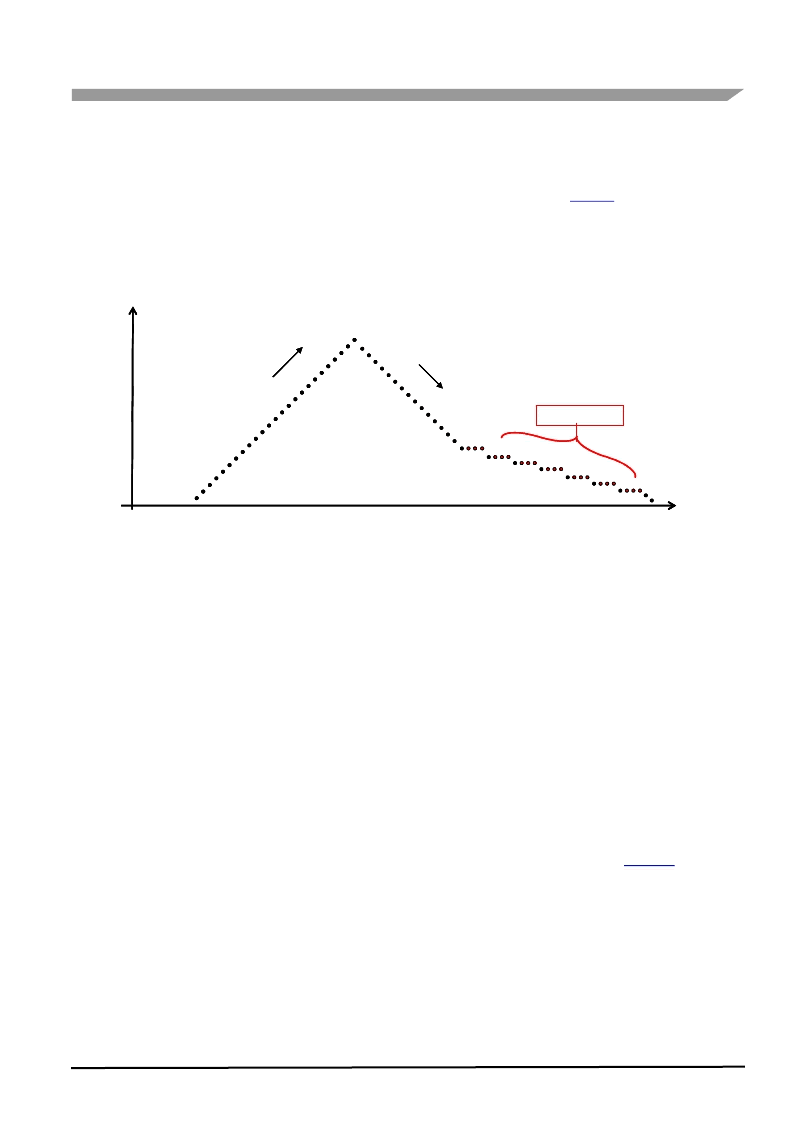
Constant acceleration and deceleration of the pointer
produces relatively choppy movements when compared to
those of an air core gauge. Modification of the velocity
position ramp during deceleration can create the desired
damped movement. This modification is accomplished in the
33977 by adding repetitive steps at several of the last velocity
position step values as the pointer decelerates. The default
movement in the 33977 uses this ramp modification feature.
An example is illustrated in
Figure 9
. If the maximum
acceleration and deceleration of the pointer is desired, the
repetitive steps can be disabled by writing Logic [1] to the
PECCR bit PE5.
.
Figure 9. Deceleration Ramp
RETURN TO ZERO CALIBRATION
Many stepper motor applications require [
that
deleted as
PV] the IC detect when the stepper motor stalls after
commanded to return to the zero position for calibration
purposes. In instrumentation applications, the stalling occurs
when the pointer hits the end stop on the gauge bezel,
[
which is
deleted as PV] usually at the zero position. It is
important to know [
that
PV] when the pointer reaches the end
stop, it immediately stops without bouncing away. The 33977
device provides the ability to automatically and independently
return the pointer to the zero position via the RTZR and
RTZCR SPI commands. An automatic RTZ is initiated, using
the RZ1 and RZ2 bits, provided the RZ4 is Logic [1]. During
an RTZ event, all commands related to the gauge being
returned are ignored until the pointer has successfully
zeroed, or the RTZR bit RZ1 is written to disable the event.
Once an RTZ event is initiated, the device reports back via
the SO pin an RTZ event is underway.
The RTZCR command is used to set the RTZ pointer
speed, choose an appropriate blanking time, and preload the
integration accumulator with an appropriate offset. On
reaching the end stop, the device reports back to the
microcontroller via the status message [
that
PV] the RTZ was
successful. The RTZ automatically disables, [
that will
PV]
allowing other commands to be valid. In the event the master
determines an RTZ sequence is not working properly, for
example, the RTZ taking too long; it can disable the
command via the RTZR bit RZ1. [Altered for better read flow]
RTZCR bits RC10:RC5 are written to preload the
accumulator with a predetermined value assuring accurate
pointer stall detection. This preloaded value can be
determined during application development by disabling the
automatic shutdown feature of the device with the RTZR bit
RZ4. This operating mode allows the master to monitor the
RTZ event, using the accumulator information available via
the SO if the device is configured to provide the RTZ
Accumulator Status. The unconditional RTZ event can be
turned OFF using the RTZR bit RZ1.
If the Position 0 location bit, RZ2, is in the default Logic [0]
mode, then during an RTZ event the pointer is returned
counterclockwise (CCW) using full steps at a constant speed
determined by the RTZCR RC3:RC0 and RC12:RC11 bits
written during RTZ configuration, see
Figure 10
. Full steps
are used during an RTZ so only coil of the motor is being
driven at any time. The coil not being driven is used to
determine if the pointer is moving. If the pointer is moving, the
flux present in the non-driven coil is processed by integrating
the back EMF signal present on the opened pin of the coil
while applying a fixed potential to the other end.
24
23
22
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
2
3
4
5
6
7
8
9
11
12
13
14
15
16
17
18
19
20
21
22
23
24
= 0
Position
Position
Microsteps
Hold Counts
Figure 8. Dec eleration Ramp
V elocity
Acceeae
Deceeae
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MCZ33989EG | System Basis Chip with High-Speed CAN Transceiver |
| MCZ33990EF | Enhanced Class B Serial Transceiver |
| MCZ33991EG | Gauge Driver Integrated Circuit |
| MCZ33993EW | Multiple Switch Detection Interface |
| MCZ33996EK | 16-Output Switch with SPI Control |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MCZ33977EG | 制造商:Freescale Semiconductor 功能描述:IC STEPPER MOTOR GAUGE DRIVER SPI |
| MCZ33977EGR2 | 功能描述:馬達/運動/點火控制器和驅(qū)動器 SINGLE GAUGE DR. LG. PTR RoHS:否 制造商:STMicroelectronics 產(chǎn)品:Stepper Motor Controllers / Drivers 類型:2 Phase Stepper Motor Driver 工作電源電壓:8 V to 45 V 電源電流:0.5 mA 工作溫度:- 25 C to + 125 C 安裝風格:SMD/SMT 封裝 / 箱體:HTSSOP-28 封裝:Tube |
| MCZ33989EG | 功能描述:網(wǎng)絡控制器與處理器 IC SBC-HS RoHS:否 制造商:Micrel 產(chǎn)品:Controller Area Network (CAN) 收發(fā)器數(shù)量: 數(shù)據(jù)速率: 電源電流(最大值):595 mA 最大工作溫度:+ 85 C 安裝風格:SMD/SMT 封裝 / 箱體:PBGA-400 封裝:Tray |
| MCZ33989EG | 制造商:Freescale Semiconductor 功能描述:IC SYSTEM BASIS W/CAN TRANCEIVER |
| MCZ33989EGR2 | 功能描述:網(wǎng)絡控制器與處理器 IC SBC-HS RoHS:否 制造商:Micrel 產(chǎn)品:Controller Area Network (CAN) 收發(fā)器數(shù)量: 數(shù)據(jù)速率: 電源電流(最大值):595 mA 最大工作溫度:+ 85 C 安裝風格:SMD/SMT 封裝 / 箱體:PBGA-400 封裝:Tray |
發(fā)布緊急采購,3分鐘左右您將得到回復。