- 您現(xiàn)在的位置:買賣IC網 > PDF目錄45322 > MT80C51C-12D (TEMIC SEMICONDUCTORS) 8-BIT, MROM, 12 MHz, MICROCONTROLLER, PQFP44 PDF資料下載
參數(shù)資料
| 型號: | MT80C51C-12D |
| 廠商: | TEMIC SEMICONDUCTORS |
| 元件分類: | 微控制器/微處理器 |
| 英文描述: | 8-BIT, MROM, 12 MHz, MICROCONTROLLER, PQFP44 |
| 文件頁數(shù): | 169/170頁 |
| 文件大?。?/td> | 4133K |
| 代理商: | MT80C51C-12D |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁第142頁第143頁第144頁第145頁第146頁第147頁第148頁第149頁第150頁第151頁第152頁第153頁第154頁第155頁第156頁第157頁第158頁第159頁第160頁第161頁第162頁第163頁第164頁第165頁第166頁第167頁第168頁當前第169頁第170頁
98
ATtiny4/5/9/10 [DATASHEET]
8127F–AVR–02/2013
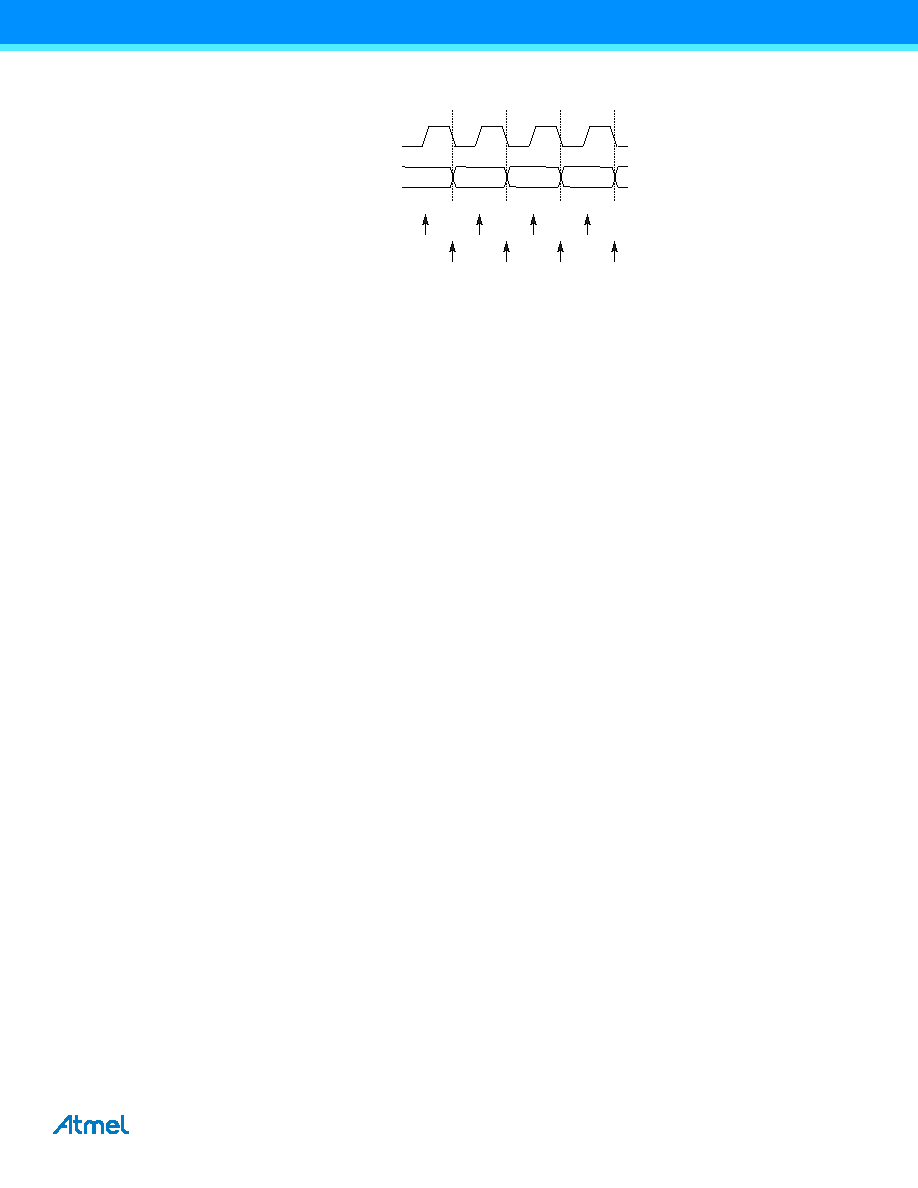
Figure 14-6. Data changing and Data sampling.
The TPI physical layer supports two modes of operation: Transmit and Receive. By default, the layer is in Receive
mode, waiting for a start bit. The mode of operation is controlled by the access layer.
14.3.7
Serial Data Reception
When the TPI physical layer is in receive mode, data reception is started as soon as a start bit has been detected.
Each bit that follows the start bit will be sampled at the rising edge of the TPICLK and shifted into the shift register
until the second stop bit has been received. When the complete frame is present in the shift register the received
data will be available for the TPI access layer.
There are three possible exceptions in the receive mode: frame error, parity error and break detection. All these
exceptions are signalized to the TPI access layer, which then enters the error state and puts the TPI physical layer
into receive mode, waiting for a BREAK character.
Frame Error Exception. The frame error exception indicates the state of the stop bit. The frame error exception
is set if the stop bit was read as zero.
Parity Error Exception. The parity of the data bits is calculated during the frame reception. After the frame is
received completely, the result is compared with the parity bit of the frame. If the comparison fails the parity
error exception is signalized.
Break Detection Exception. The Break detection exception is given when a complete frame of all zeros has
been received.
14.3.8
Serial Data Transmission
When the TPI physical layer is ready to send a new frame it initiates data transmission by loading the shift register
with the data to be transmitted. When the shift register has been loaded with new data, the transmitter shifts one
complete frame out on the TPIDATA line at the transfer rate given by TPICLK.
If a collision is detected during transmission, the output driver is disabled. The TPI access layer enters the error
state and the TPI physical layer is put into receive mode, waiting for a BREAK character.
14.3.9
Collision Detection Exception
The TPI physical layer uses one bi-directional data line for both data reception and transmission. A possible drive
contention may occur, if the external programmer and the TPI physical layer drive the TPIDATA line simultane-
ously. In order to reduce the effect of the drive contention, a collision detection mechanism is supported. The
collision detection is based on the way the TPI physical layer drives the TPIDATA line.
The TPIDATA line is driven by a tri-state, push-pull driver with internal pull-up. The output driver is always enabled
when a logical zero is sent. When sending successive logical ones, the output is only driven actively during the first
clock cycle. After this, the output driver is automatically tri-stated and the TPIDATA line is kept high by the internal
pull-up. The output is re-enabled, when the next logical zero is sent.
TPIDATA
TPICLK
SAMPLE
SETUP
相關PDF資料 |
PDF描述 |
|---|---|
| MP80C51C-20D | 8-BIT, MROM, 20 MHz, MICROCONTROLLER, PDIP40 |
| MS80C51T-16R | 8-BIT, MROM, 16 MHz, MICROCONTROLLER, PQCC44 |
| MF280C31-12R | 8-BIT, 12 MHz, MICROCONTROLLER, PQFP44 |
| MV80C51-16D | 8-BIT, MROM, 16 MHz, MICROCONTROLLER, PQFP44 |
| MP80C51-36D | 8-BIT, MROM, 36 MHz, MICROCONTROLLER, PDIP40 |
相關代理商/技術參數(shù) |
參數(shù)描述 |
|---|---|
| MT80C51FB | 制造商:Rochester Electronics LLC 功能描述:- Bulk |
| MT80C51FB/B | 制造商:Intel 功能描述: |
| MT80GB | 制造商:Datak Corporation 功能描述: |
| MT80JSF1G72NDY-1G1F1A2 | 制造商:Micron Technology Inc 功能描述:8GB 1GX72 DDR3 SDRAM MODULE PBF DIMM 1.5V REGISTERED - Trays |
| MT80KSF1G72NDY-1G4F1A3 | 制造商:Micron Technology Inc 功能描述:8GB 1GX72 DDR3 SDRAM MODULE PBF DIMM 1.35V FULLY BUFFERED - Trays |
發(fā)布緊急采購,3分鐘左右您將得到回復。