- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄366891 > CR16HCT9VJE7 Microcontroller PDF資料下載
參數(shù)資料
| 型號: | CR16HCT9VJE7 |
| 英文描述: | Microcontroller |
| 中文描述: | 微控制器 |
| 文件頁數(shù): | 103/157頁 |
| 文件大?。?/td> | 1256K |
| 代理商: | CR16HCT9VJE7 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁當前第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁第142頁第143頁第144頁第145頁第146頁第147頁第148頁第149頁第150頁第151頁第152頁第153頁第154頁第155頁第156頁第157頁
103
www.national.com
CIPND register (read only) and can be cleared by resetting
the flags in the CICLR registers.
20.7.1
In order to reduce decoding time of the CIPND register, the
buffer interrupt request with the highest priority is placed as
interrupt status code into the IST[3:0] section of the CSTPND
register.
Each of the buffer interrupts as well as the error interrupt can
be individually enabled or disabled in the CAN Interrupt En-
able register (CIEN). As soon as an interrupt condition oc-
curs, every interrupt request is indicated by a flag in the CAN
Interrupt Pending register (CIPND). When the interrupt code
logic for the present highest priority interrupt request is en-
abled, this interrupt will be translated into the IST[3:0] bits of
the CAN Status Pending register (CSTPND). An interrupt re-
quest can be cleared by setting the corresponding bit in the
CAN Interrupt Clear register (CICLR) to ‘1’.
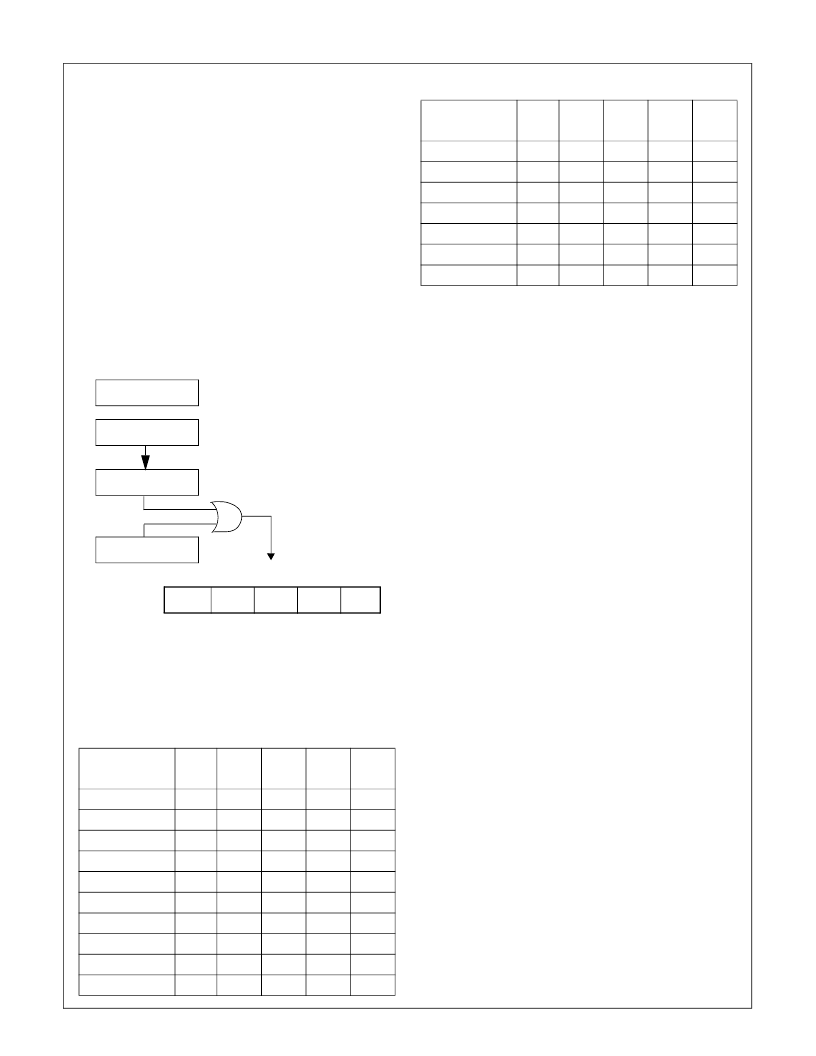
Figure 67 illustrates the CR16CAN interrupt management.
Highest Priority Interrupt Code
The highest priority interrupt source is translated into the bits
IRQ and IST[3:0] as shown in Table 24.
Table 24
Highest Priority Interrupt Code (ICEN=FFFF)
CAN interrupt
request
IRQ
IST3
IST2
IST1
IST0
no request
0
0
0
0
0
Error interrupt
1
0
0
0
0
Buffer 0
1
0
0
0
1
Buffer 1
1
0
0
1
0
Buffer 2
1
0
0
1
1
Buffer 3
1
0
1
0
0
Buffer 4
1
0
1
0
1
Buffer 5
1
0
1
1
0
Buffer 6
1
0
1
1
1
Buffer 7
1
1
0
0
0
Figure 67.
CR16CAN Interrupt Management
CIPND
IST0
IST1
IST2
IST3
ICODE
clear interrupt flags of every
message buffer individually
IRQ
CICLR
CIEN
CICEN
Buffer 8
1
1
0
0
1
Buffer 9
1
1
0
1
0
Buffer 10
1
1
0
1
1
Buffer 11
1
1
1
0
0
Buffer 12
1
1
1
0
1
Buffer 13
1
1
1
1
0
Buffer 14
1
1
1
1
1
Table 24
Highest Priority Interrupt Code (ICEN=FFFF)
CAN interrupt
request
IRQ
IST3
IST2
IST1
IST0
相關PDF資料 |
PDF描述 |
|---|---|
| CR16HCT9VJE7Y | Microcontroller |
| CR16HCT9VJE8 | Microcontroller |
| CR16HCT9VJE8Y | Microcontroller |
| CR16HCT9VJE9 | Microcontroller |
| CR16HCT9VJE9Y | Microcontroller |
相關代理商/技術參數(shù) |
參數(shù)描述 |
|---|---|
| CR16HCT9VJE7Y | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Microcontroller |
| CR16HCT9VJE8 | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Microcontroller |
| CR16HCT9VJE8Y | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Microcontroller |
| CR16HCT9VJE9 | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Microcontroller |
| CR16HCT9VJE9Y | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Microcontroller |
發(fā)布緊急采購,3分鐘左右您將得到回復。