- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄371415 > 272420-007 (Intel Corp.) Intel386 EX Embedded Microprocessor PDF資料下載
參數(shù)資料
| 型號: | 272420-007 |
| 廠商: | Intel Corp. |
| 英文描述: | Intel386 EX Embedded Microprocessor |
| 中文描述: | 英特爾386防爆嵌入式微處理器 |
| 文件頁數(shù): | 35/56頁 |
| 文件大?。?/td> | 766K |
| 代理商: | 272420-007 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁當(dāng)前第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁
Intel386 EX Embedded Microprocessor
Datasheet
35
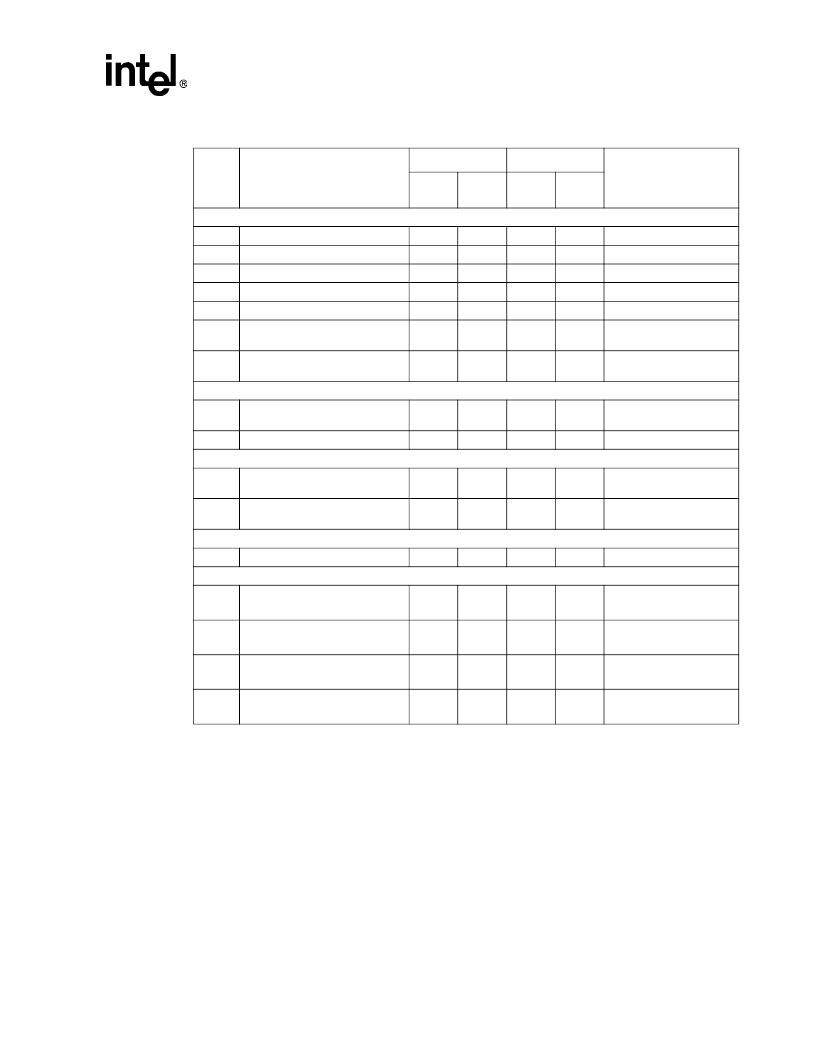
Timer Control Unit (TCU) Inputs
t
107
t
108
t
109
t
110
t
111
TMRCLKn Frequency
8
8
(Unit is MHz)
TMRCLKn Low
60
60
TMRCLKn High
60
60
TMRGATEn High Width
50
50
TMRGATEn Low Width
50
50
t
112
TMRGATEn to TMRCLK Setup
Time (external TMRCLK only)
10
10
t
112a
TMRGATEn to TMRCLK Hold
Time (external TMRCLK only)
11
11
Timer Control Unit (TCU) Outputs
t
113
TMRGATEn Low to TMROUT
Valid
29
32
t
114
Interrupt Control Unit (ICU) Inputs
TMRCLKn Low to TMROUT Valid
29
32
t
115
D7:0 Setup Time
(INTA# Cycle 2)
7
7
t
116
D7:0 Hold Time
(INTA# Cycle 2)
4
4
Interrupt Control Unit (ICU) Outputs
t
117
DMA Unit Inputs
CLK2 High to CAS2:0 Valid
25
28
t
118
DREQ Setup Time
(Sync Mode)
15
15
t
119
DREQ Hold Time
(Sync Mode)
4
4
(2)
t
120
DREQ Setup Time
(Async Mode)
9
9
t
121
DREQ Hold Time
(Async Mode)
9
9
(2)
Table 11. 5-Volt AC Characteristics (Sheet 4 of 5)
Symbol
Parameter
33 MHz
25 MHz
Test Condition
Min.
(ns)
Max.
(ns)
Min.
(ns)
Max.
(ns)
NOTE:
1. Tested at maximum operating frequency and guaranteed by design characterization at lower operating
frequencies.
2. These are not tested. They are guaranteed by characterization.
3. Float condition occurs when maximum output current becomes less than I
LO
in magnitude. Float delay is not
fully tested.
4. These inputs may be asynchronous to CLK2. The setup and hold specifications are given to ensure recognition
within a specific CLK2 period.
5. These specifications are for information only and are not tested. They are intended to assist the designer in
selecting memory speeds. For each wait state in the design add two CLK2 cycles to the specification.
6. This specification assumes that READY# goes active after the rising edge of phase 2, so that WR# goes
inactive as a result of READY# falling.
7. This specification assumes that READY# goes active before the rising edge of phase 2, so that WR# goes
inactive as a result of phase 2 rising.
8. This specification applies if READY# is generated internally.
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| 2729-170 | 170 Watts, 38 Volts, 100祍, 10% Radar 2700-2900 MHz |
| 2731-100M | 100 Watts, 36 Volts, 200us, 10% Radar 2700-3100 MHz |
| 2732 | MOS Memory Products |
| 273F06PP481R | POLYPROPYLENE-FOIL SELF CASED AXIAL LEADS |
| 273K06PP580R | POLYPROPYLENE-FOIL SELF CASED AXIAL LEADS |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| 2724229 | 制造商:Phoenix Contact 功能描述:IBS ELR COV P-6A |
| 272423-000 | 功能描述:焊料和屏蔽管 CWT-9 RoHS:否 制造商:TE Connectivity / Raychem 類型:Shield Terminators 材料:Polyvinylidene Fluoride 內(nèi)徑:5.08 mm 長度:16.5 mm 最低收縮溫度: 系列:S03 |
| 2724232 | 制造商:Phoenix Contact 功能描述:IBS ELR COV W-6A |
| 2724245 | 制造商:Phoenix Contact 功能描述:IBS ELR COV 2-6A |
| 272-425A | 制造商:LG Corporation 功能描述:KNOBVOL/EQ, CFX-425A US1, TW |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。