- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄11581 > ENC424J600T-I/ML (Microchip Technology)IC ETHERNET CTRLR W/SPI 44-QFN PDF資料下載
參數(shù)資料
| 型號: | ENC424J600T-I/ML |
| 廠商: | Microchip Technology |
| 文件頁數(shù): | 124/168頁 |
| 文件大小: | 0K |
| 描述: | IC ETHERNET CTRLR W/SPI 44-QFN |
| 視頻文件: | Fast 100 Mbps Ethernet PICtail Plus Overview |
| 標(biāo)準(zhǔn)包裝: | 1,600 |
| 控制器類型: | 以太網(wǎng)控制器(IEEE 802.3) |
| 接口: | SPI |
| 電源電壓: | 3 V ~ 3.6 V |
| 電流 - 電源: | 96mA |
| 工作溫度: | -40°C ~ 85°C |
| 安裝類型: | 表面貼裝 |
| 封裝/外殼: | 44-VQFN 裸露焊盤 |
| 供應(yīng)商設(shè)備封裝: | 44-QFN(8x8) |
| 包裝: | 帶卷 (TR) |
| 配用: | AC164132-ND - BOARD DAUGHTER PICTAIL ETHERNET |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁當(dāng)前第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁第142頁第143頁第144頁第145頁第146頁第147頁第148頁第149頁第150頁第151頁第152頁第153頁第154頁第155頁第156頁第157頁第158頁第159頁第160頁第161頁第162頁第163頁第164頁第165頁第166頁第167頁第168頁
2007 Microchip Technology Inc.
DS21993C-page 57
PIC16CR7X
8.5
PWM Mode (PWM)
In Pulse Width Modulation mode, the CCPx pin
produces up to a 10-bit resolution PWM output. Since
the CCP1 pin is multiplexed with the PORTC data latch,
the TRISC<2> bit must be cleared to make the CCP1
pin an output.
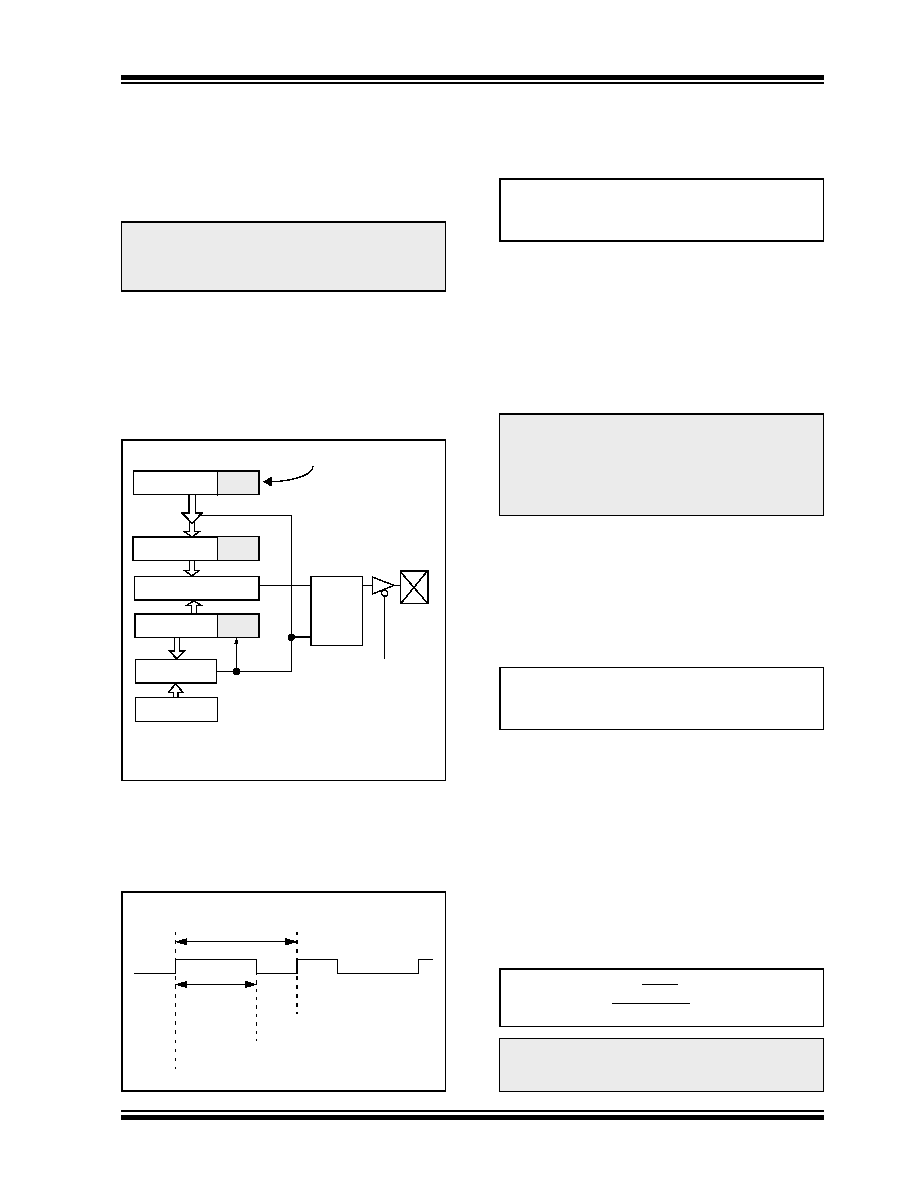
Figure 8-3 shows a simplified block diagram of the
CCP module in PWM mode.
For a step-by-step procedure on how to set up the CCP
module for PWM operation, see Section 8.5.3 “SetUp
FIGURE 8-3:
SIMPLIFIED PWM BLOCK
DIAGRAM
A PWM output (Figure 8-4) has a time base (period)
and a time that the output stays high (duty cycle). The
frequency of the PWM is the inverse of the period
(1/period).
FIGURE 8-4:
PWM OUTPUT
8.5.1
PWM PERIOD
The PWM period is specified by writing to the PR2
register. The PWM period can be calculated using the
following formula:
PWM frequency is defined as 1 / [PWM period].
When TMR2 is equal to PR2, the following three events
occur on the next increment cycle:
TMR2 is cleared
The CCP1 pin is set (exception: if PWM duty
cycle = 0%, the CCP1 pin will not be set)
The PWM duty cycle is latched from CCPR1L into
CCPR1H
8.5.2
PWM DUTY CYCLE
The PWM duty cycle is specified by writing to the
CCPR1L register and to the CCP1CON<5:4> bits. Up
to 10-bit resolution is available. The CCPR1L contains
the eight MSbs and the CCP1CON<5:4> contains the
two LSbs. This 10-bit value is represented by
CCPR1L:CCP1CON<5:4>. The following equation is
used to calculate the PWM duty cycle in time:
CCPR1L and CCP1CON<5:4> can be written to at any
time, but the duty cycle value is not latched into
CCPR1H until after a match between PR2 and TMR2
occurs (i.e., the period is complete). In PWM mode,
CCPR1H is a read-only register.
The CCPR1H register and a 2-bit internal latch are
used to double buffer the PWM duty cycle. This double
buffering is essential for glitchless PWM operation.
When the CCPR1H and 2-bit latch match TMR2,
concatenated with an internal 2-bit Q clock or 2 bits of
the TMR2 prescaler, the CCP1 pin is cleared.
The maximum PWM resolution (bits) for a given PWM
frequency is given by the formula:
Note:
Clearing the CCP1CON register will force
the CCP1 PWM output latch to the default
low level. This is not the PORTC I/O data
latch.
CCPR1L
CCPR1H (Slave)
Comparator
TMR2
Comparator
PR2
(1)
RQ
S
Duty Cycle Registers
CCP1CON<5:4>
Clear Timer,
CCP1 pin and
latch D.C.
TRISC<2>
RC2/CCP1
(Note 1)
Note 1: The 8-bit timer is concatenated with the 2-bit inter-
nal Q clock or the 2 bits of the prescaler to create the
10-bit time base.
Period
Duty Cycle
TMR2 = PR2
TMR2 = Duty Cycle
TMR2 = PR2
TMR2
Reset
TMR2
Reset
Note:
The Timer2 postscaler (see Section 8.3
“Capture Mode”) is not used in the deter-
mination of the PWM frequency. The
postscaler could be used to have a servo
update rate at a different frequency than
the PWM output.
Note:
If the PWM duty cycle value is longer than
the PWM period, the CCP1 pin will not be
cleared.
PWM period = [(PR2) + 1] 4 TOSC
(TMR2 prescale value)
PWM duty cycle = (CCPR1L:CCP1CON<5:4>)
TOSC (TMR2 prescale value)
log
(
FPWM
log(2)
FOSC )
bits
=
Resolution
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| PIC16F677-E/P | IC PIC MCU FLASH 2KX14 20DIP |
| MCP2155-I/P | IC IRDA PROTOCOL CTRLR 18DIP |
| MCP2150T-I/SS | IC IRDA STD CONTROLLER 20SSOP |
| MCP2155T-I/SO | IC IRDA PROTOCOL CONTRLR 18-SOIC |
| PIC18F25J10T-I/SS | IC PIC MCU FLASH 16KX16 28SSOP |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| ENC424J600T-IPT | 制造商:MICROCHIP 制造商全稱:Microchip Technology 功能描述:Stand-Alone 10/100 Ethernet Controller with SPI or Parallel Interface |
| ENC431D05A | 制造商:未知廠家 制造商全稱:未知廠家 功能描述: |
| ENC431D-05A | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:STD MOV |
| ENC431D07A | 制造商:未知廠家 制造商全稱:未知廠家 功能描述: |
| ENC431D-07A | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:STD MOV |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。