- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄371086 > MCM62Y308J17 (MOTOROLA INC) Synchronous Line Buffer:8K x 8 Bit Fast Static Dual Ported Memory PDF資料下載
參數(shù)資料
| 型號(hào): | MCM62Y308J17 |
| 廠商: | MOTOROLA INC |
| 元件分類(lèi): | DRAM |
| 英文描述: | Synchronous Line Buffer:8K x 8 Bit Fast Static Dual Ported Memory |
| 中文描述: | 8K X 8 MULTI-PORT SRAM, 17 ns, PDSO32 |
| 封裝: | 0.300 INCH, SOJ-32 |
| 文件頁(yè)數(shù): | 10/16頁(yè) |
| 文件大小: | 257K |
| 代理商: | MCM62Y308J17 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)當(dāng)前第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)
MCM62Y308
10
MOTOROLA FAST SRAM
be sampled regardless of G). Only one action will be per-
formed in the Run–Test/Idle state no matter how many clock
cycles are input. Note that TCK, not the Clock pin(K), is used
as the clock input while K is ignored during INTEST. After one
or more clock cycles of TCK, the TAP controller would then be
moved to the Shift–DR state where the sampled values would
be shifted out of TDO (and new values would be shifted in
TDI). These values would normally be compared to expected
values to test for device functionality.
THE INTEST TAP INSTRUCTION
The INTEST instruction is intended to be used to assist in
testing internal device functionality. When the INTEST instruc-
tion is loaded the boundary–scan register is placed between
TDI and TDO in the Shift–DR state of the TAP controller (Table
2). While in the Shift–DR state, all input pins would be pre-
loaded via the boundary scan register to set up the desired
mode (i.e., read, write, reload, etc.). The TAP controller would
then be moved to the Run–Test/Idle state. In this state one or
more cycles of TCK would cause the preloaded data in the
boundary–scan register to be driven while the values of
Q0 – Q7 would be sampled (Q0 – Q7 will be active only if G
is preloaded with a zero, however the values of Q0 – Q7 will
be sampled regardless of G). Only one action will be per-
formed in the Run–Test/Idle state no matter how many clock
cycles are input. Note that TCK, not the Clock pin(K), is used
as the clock input while K is ignored during INTEST. After one
or more clock cycles of TCK, the TAP controller would then be
moved to the Shift–DR state where the sampled values would
be shifted out of TDO (and new values would be shifted in
TDI). These values would normally be compared to expected
values to test for device functionality.
Since device functionality can only be verified through sam-
pling the outputs of the device, the most likely use of INTEST
would be to first load up the boundary–scan register for a Write
Reload and execute the reload in the Run–Test/Idle state.
Then a write of the first address would be performed again
using the boundary scan register to load up the input registers
and executing the write in the Run–Test/Idle state. Lastly, a
Read Reload would be executed in the same manner so that
the data that had just been written in the first address would
be read from the memory array and written into the output reg-
isters which would then be shifted out of TDO in the Shift–DR
state. The values of the roll–over flags (RRF and WRF) would
also be sampled and shifted out at the same time for compari-
son to expected values.
There are easier ways to serially read and write the memory
array. See the EZREAD and EZWRITE TAP instruction ex-
planation.
CLAMP TAP INSTRUCTION
The CLAMP instruction is provided to allow the state of the
signals driven from the output pins to be determined from the
boundary–scan register while the bypass register is selected
as the serial path between TDI and TDO. The signals driven
from the output pins will not change while the CLAMP instruc-
tion is selected. EXTEST could also be used for this purpose
but CLAMP shortens the board scan path by inserting only the
bypass register between TDI and TDO. To use CLAMP, the
SAMPLE/PRELOAD instruction would be used first to scan in
the values to be driven on the output pins when the CLAMP
instruction is active. Q0 – Q7 will be active only if G is pre-
loaded with a zero.
HIGH–Z TAP INSTRUCTION
The High–Z instruction is provided to allow all the outputs
(except TDO) to be placed in an inactive drive state (High–Z),
including the Read Roll–Over Flag and the Write Roll–Over
Flag outputs. During the High–Z instruction the bypass regis-
ter is connected between TDI and TDO.
BYPASS TAP INSTRUCTION
The Bypass instruction is the default instruction loaded in at
power up. This instruction will place a single shift register be-
tween TDI and TDO during the Shift–DR state of the TAP con-
troller. This allows the board level scan path to be shortened
to facilitate testing of other devices in the scan path.
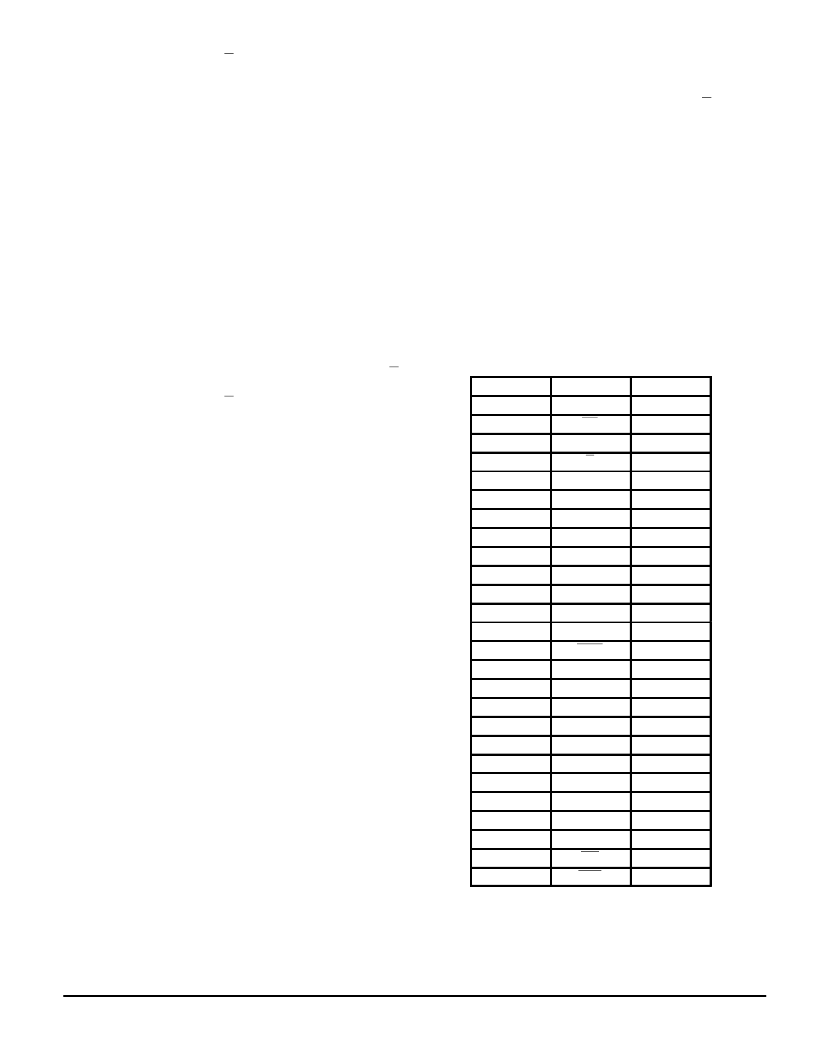
Table 2. Boundary Scan Register Bit Definitions
Bit Number
Pin Name
Pin Type
0
RRF
Output
1
RR
Input
2
RE
Input
3
G
Input
4
Q0
Output
5
Q1
Output
6
Q2
Output
7
Q3
Output
8
Q4
Output
9
Q5
Output
10
Q6
Output
11
Q7
Output
12
WRF
Output
13
WRR
Input
14
D7
Input
15
D6
Input
16
D5
Input
17
D4
Input
18
D3
Input
19
D2
Input
20
D1
Input
21
D0
Input
22
K
Input
23
WE
Input
24
WR
Input
25
RRR
Input
NOTE: K is a sample–only scan bit. It cannot be
pre–loaded for control purposes.
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MCM6323A | 64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323AYJ10 | 64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323AYJ10R | 64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323AYJ12 | 64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323AYJ12R | 64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MCM6323A | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323ATS10 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323ATS10R | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323ATS12 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
| MCM6323ATS12R | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:64K x 16 Bit 3.3 V Asynchronous Fast Static RAM |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。