- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄45234 > MC68HC58FN (MOTOROLA INC) 1 CHANNEL(S), LOCAL AREA NETWORK CONTROLLER, PQCC28 PDF資料下載
參數(shù)資料
| 型號: | MC68HC58FN |
| 廠商: | MOTOROLA INC |
| 元件分類: | 微控制器/微處理器 |
| 英文描述: | 1 CHANNEL(S), LOCAL AREA NETWORK CONTROLLER, PQCC28 |
| 封裝: | PLASTIC, LCC-28 |
| 文件頁數(shù): | 52/102頁 |
| 文件大小: | 700K |
| 代理商: | MC68HC58FN |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁當(dāng)前第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁
MC68HC58
DATA LINK CONTROLLER OPERATION
MOTOROLA
TECHNICAL DATA
4-9
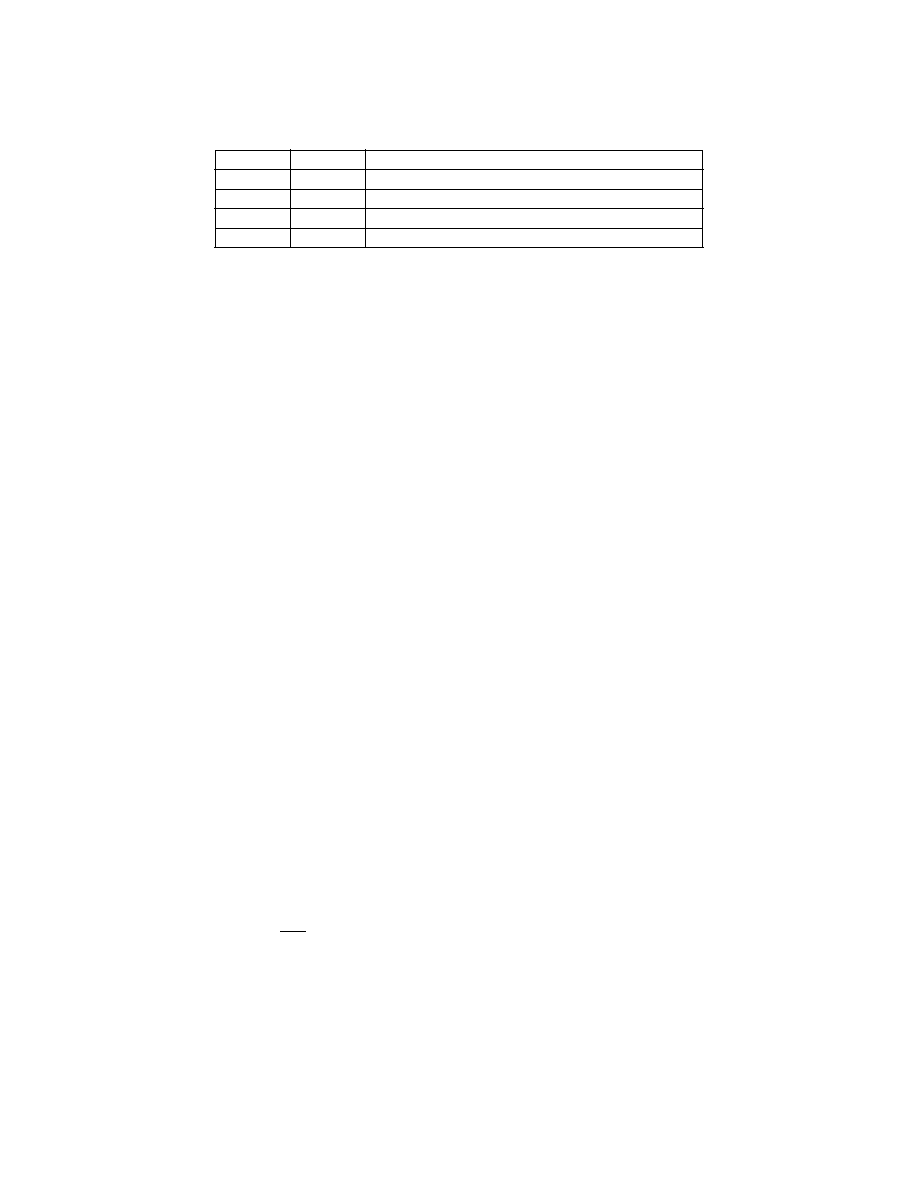
Table 4-3 shows the types of serial transfers.
4.2.2.2 Servicing Sequence
For every byte transmitted from the host to the DLC, there is a byte transferred from
the DLC to the host. Each data byte sent to the DLC is accompanied by a status byte
that is sent to the host. Each command byte sent to the DLC is accompanied by a re-
ceived data byte that is sent to the host.
The host MCU services the DLC in the following sequence:
1. Read status byte and data byte.
2. Write data byte, configuration byte, or null byte and command byte.
Received data remains in the RxFIFO buffer until a flush byte command is received.
However, the flush command can accompany the read command. Each transmit data
byte must be accompanied by a command byte that designates it as a first, intermedi-
ate, or last byte.
4.2.2.3 SPI Exchange
The host MCU controls SCLK polarity and phase. The DLC is compatible with two
SCLK configurations:
SCLK polarity normally high, read data on SCLK passive to active level, change
data on SCLK active to passive level.
SCLK normally low, read data on SCLK passive to active level, change data on
SCLK active to passive level.
The general format of the data exchange from the DLC to the host MCU is a bit-for-bit
exchange on each SCLK clock pulse. Data is read in on the passive to active level of
the SCLK, and is changed on the active to passive level of SCLK. The most significant
bit of a transfer is sent first. Figure 4-6 shows a 16-bit data transfer with low clock po-
larity. Figure 4-7 shows a 16-bit data transfer with high clock polarity.
NOTE
This 16-bit transfer can be performed using two 8-bit transfers as
long as CS is asserted before the first 8-bit transfer begins, and re-
mains asserted until the end of the second 8-bit transfer.
Table 4-3 Serial Transfers
1st Byte
2nd Byte
Type of Transfer
—
SIMO
Command byte
SOMI
—
Status byte
SIMO
—
Transmit byte, configuration byte, or null byte
—
SOMI
Receive byte, completion code, or null byte
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MC68HC58DW | 1 CHANNEL(S), LOCAL AREA NETWORK CONTROLLER, PDSO28 |
| MC68HC68T1P | 1 TIMER(S), REAL TIME CLOCK, PDIP16 |
| MC68HC705B16NVFNR2 | 8-BIT, OTPROM, 2.1 MHz, MICROCONTROLLER, PQCC52 |
| MC68HC705B16NCFNR2 | 8-BIT, OTPROM, 2.1 MHz, MICROCONTROLLER, PQCC52 |
| MC68HC705B16VFNR2 | 8-BIT, OTPROM, 2.1 MHz, MICROCONTROLLER, PQCC52 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MC68HC68T1P | 制造商:Motorola Inc 功能描述: |
| MC68HC705B16CFN | 制造商:Motorola Inc 功能描述: |
| MC68HC705B16FN | 制造商:Rochester Electronics LLC 功能描述: |
| MC68HC705B16NB | 制造商:Rochester Electronics LLC 功能描述: |
| MC68HC705B16NCB | 制造商:Rochester Electronics LLC 功能描述: |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。