- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄373200 > KU386 (Intel Corp.) SX MICROPROCESSOR PDF資料下載
參數(shù)資料
| 型號(hào): | KU386 |
| 廠商: | Intel Corp. |
| 英文描述: | SX MICROPROCESSOR |
| 中文描述: | SX微處理器 |
| 文件頁(yè)數(shù): | 50/102頁(yè) |
| 文件大小: | 1268K |
| 代理商: | KU386 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)當(dāng)前第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)
Intel386
TM
SX MICROPROCESSOR
Non-Pipelined Address
Any bus cycle may be performed with non-pipelined
address timing. For example, Figure 5.6 shows a
mixture of read and write cycles with non-pipelined
address timing. Figure 5.6 shows that the fastest
possible cycles with non-pipelined address have two
bus states per bus cycle. The states are named T1
and T2. In phase one of T1, the address signals and
bus cycle definition signals are driven valid and, to
signal their availability, address strobe (ADS
Y
) is
simultaneously asserted.
During read or write cycles, the data bus behaves as
follows. If the cycle is a read, the Intel386 SX Micro-
processor floats its data signals to allow driving by
the external device being addressed.
The Intel386
SX Microprocessor requires that all data bus
pins be at a valid logic state (HIGH or LOW) at
the end of each read cycle, when READY
Y
is
asserted. The system MUST be designed to
meet this requirement.
If the cycle is a write, data
signals are driven by the Intel386 SX Microproces-
sor beginning in phase two of T1 until phase one of
the bus state following cycle acknowledgment.
Figure 5.7 illustrates non-pipelined bus cycles with
one wait state added to Cycles 2 and 3. READY
Y
is
sampled inactive at the end of the first T2 in Cycles
2 and 3. Therefore Cycles 2 and 3 have T2 repeated
again. At the end of the second T2, READY
Y
is
sampled active.
When address pipelining is not used, the address
and bus cycle definition remain valid during all wait
states. When wait states are added and it is desir-
able to maintain non-pipelined address timing, it is
necessary to negate NA
Y
during each T2 state ex-
cept the last one, as shown in Figure 5.7 Cycles 2
and 3. If NA
Y
is sampled active during a T2 other
than the last one, the next state would be T2I or T2P
instead of another T2.
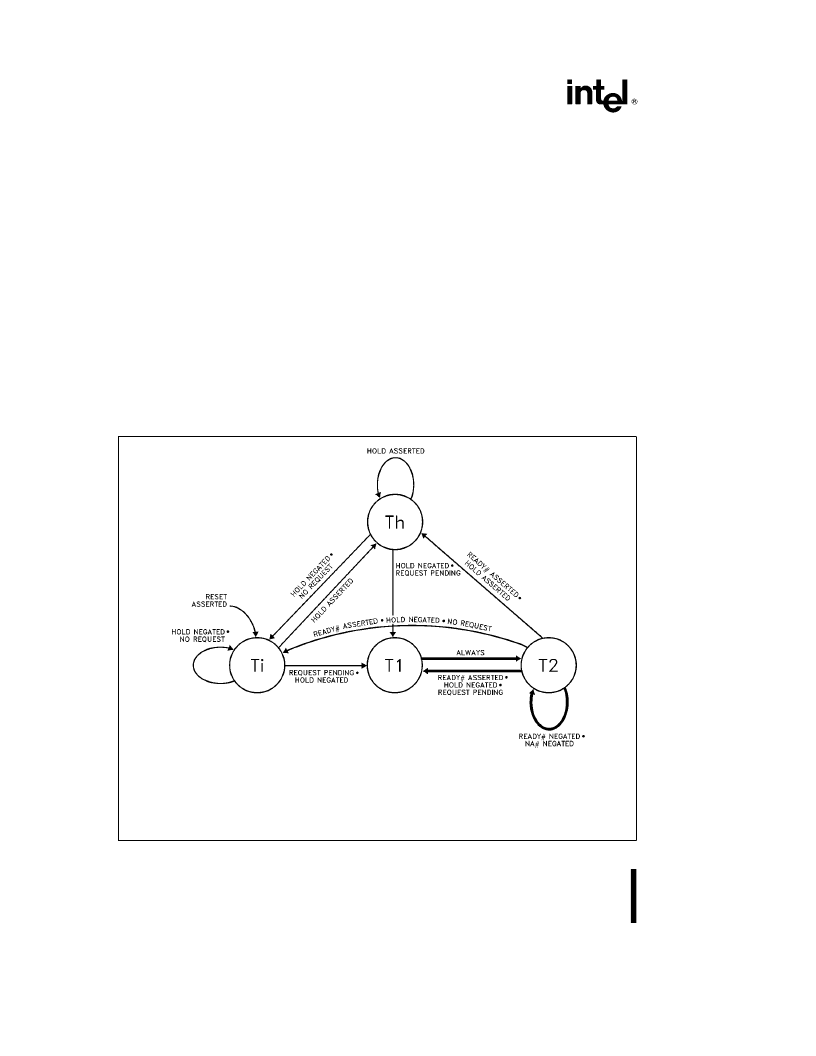
When address pipelining is not used, the bus states
and transitions are completely illustrated by Figure
5.8. The bus transitions between four possible
states, T1, T2, T
i
, and T
h
. Bus cycles consist of T1
and T2, with T2 being repeated for wait states. Oth-
erwise the bus may be idle, T
i
, or in the hold ac-
knowledge state T
h
.
240187–23
Bus States:
T1Dfirst clock of a non-pipelined bus cycle (Intel386
TM
SX CPU drives new address and asserts ADS
Y
).
T2Dsubsequent clocks of a bus cycle when NA
Y
has not been sampled asserted in the current bus cycle.
TiDidle state.
ThDhold acknowledge state (Intel386 SX CPU asserts HLDA).
The fastest bus cycle consists of two states T1 and T2.
Four basic bus states describe bus operation when not using pipelined address.
Figure 5.8. Bus States (not using pipelined address)
50
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| KU80C186EC25 | 16-BIT HIGH-INTEGRATION EMBEDDED PROCESSORS |
| KU80C188EC16 | 16-BIT HIGH-INTEGRATION EMBEDDED PROCESSORS |
| KU80C188EC25 | 16-BIT HIGH-INTEGRATION EMBEDDED PROCESSORS |
| KU80L186EC16 | 16-BIT HIGH-INTEGRATION EMBEDDED PROCESSORS |
| KU80L186EC20 | 16-BIT HIGH-INTEGRATION EMBEDDED PROCESSORS |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| KU-3C-110D | 制造商:M.E.C. Relays 功能描述: |
| KU-3C-120A | 制造商:M.E.C. Relays 功能描述: 制造商:Master Electronic Controls (MEC) 功能描述: |
| KU-3C-12A | 制造商:M.E.C. Relays 功能描述: |
| KU-3C-12D | 制造商:M.E.C. Relays 功能描述: |
| KU-3C-240A | 制造商:M.E.C. Relays 功能描述: |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。