- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄371179 > T8302 T8302 Internet Protocol Telephone Advanced RISC Machine (ARM) Ethernet QoS Using IEEE 802.1q PDF資料下載
參數(shù)資料
| 型號: | T8302 |
| 英文描述: | T8302 Internet Protocol Telephone Advanced RISC Machine (ARM) Ethernet QoS Using IEEE 802.1q |
| 中文描述: | T8302因特網(wǎng)協(xié)議電話高級RISC機(jī)(ARM)的以太網(wǎng)使用IEEE 802.1q的服務(wù)質(zhì)量 |
| 文件頁數(shù): | 190/248頁 |
| 文件大?。?/td> | 7321K |
| 代理商: | T8302 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁第142頁第143頁第144頁第145頁第146頁第147頁第148頁第149頁第150頁第151頁第152頁第153頁第154頁第155頁第156頁第157頁第158頁第159頁第160頁第161頁第162頁第163頁第164頁第165頁第166頁第167頁第168頁第169頁第170頁第171頁第172頁第173頁第174頁第175頁第176頁第177頁第178頁第179頁第180頁第181頁第182頁第183頁第184頁第185頁第186頁第187頁第188頁第189頁當(dāng)前第190頁第191頁第192頁第193頁第194頁第195頁第196頁第197頁第198頁第199頁第200頁第201頁第202頁第203頁第204頁第205頁第206頁第207頁第208頁第209頁第210頁第211頁第212頁第213頁第214頁第215頁第216頁第217頁第218頁第219頁第220頁第221頁第222頁第223頁第224頁第225頁第226頁第227頁第228頁第229頁第230頁第231頁第232頁第233頁第234頁第235頁第236頁第237頁第238頁第239頁第240頁第241頁第242頁第243頁第244頁第245頁第246頁第247頁第248頁
188
Agere Systems Inc.
T8302 Internet Protocol Telephone
Advanced RISC Machine (
ARM
)
Data Sheet
July 2001
14 IrDA_ACC and UART_ACC
(continued)
14.1.1 Transmit and Receive Operation
In order to transmit data on the transmit line Tx, the
baud rate register
(see Table 170 on page 190)
is set, the
sample mode field of the
mode control register
(see Table 176 on page 193)
is set, the
transmitter control reg-
ister
is set
(see Table 175 on page 193)
, and then data is written into the transmitter FIFO. The data from the trans-
mitter FIFO is transferred to the
transmitter shift register
. A start bit is generated and then the data is shifted to
the output one bit at a time at the rate programmed in the
baud rate register
and the sample mode field of the
mode control register
. The data transmitted is synchronized to the baud rate generator so the width of the start bit
does not vary. The optional parity bit is then generated, followed by stop bit(s).
To receive serial data from the
Rx
input pin, set the baud rate and the
receiver control register
(see Table 173 on
page 192)
. When a start bit is detected, the data on the
Rx
line is shifted into the
receiver shift register
. This is
done by delaying one-half bit time and then sampling each data bit in the center of its ideal bit time. There is some
error when data is sampled if the baud rate counter does not match the baud rate exactly. The error introduced is
determined by the values programmed in the
baud rate register
and the sample mode field of the
mode control
register
. After shifting one character and the optional parity bit into the
receiver shift register
, the data is tested
for a parity error and the data is transferred to the receiver FIFO. If the controller detects receive errors, it sets
appropriate error bits in the
FIFO status register
(see Table 172 on page 191)
and generates an interrupt if the
ACC interrupt enable register
(see Table 180 on page 196)
was set to enable the corresponding interrupt.
A single interrupt line for each ACC is connected to the interrupt controller. When the
ARM
receives an interrupt
from one of the ACCs, the interrupt type is read from the respective
ACC’s
interrupt
register
.
14.1.2 Transfer Operating Modes
The ACC operates in several modes. There are 8 or 9 bits of data followed by optional parity bits. The receiver and
transmitter
can
operate in different parity modes but use the same number of data bits.
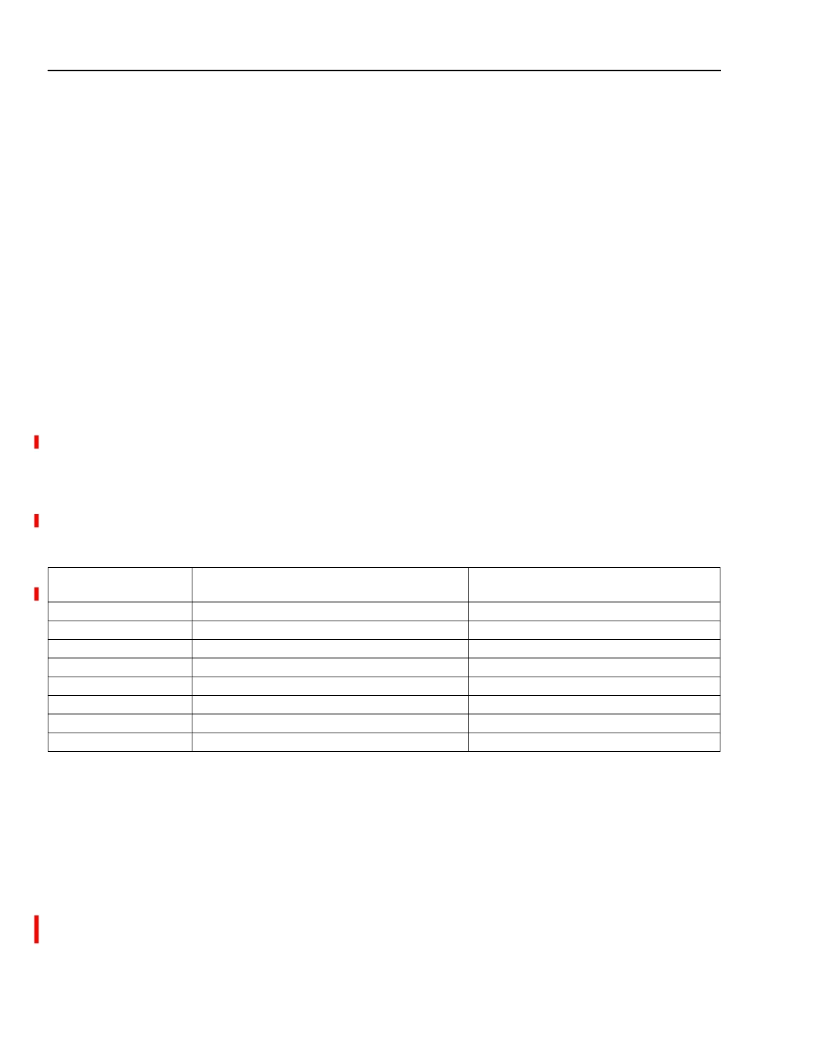
Table 167. ACC Transfer Modes
14.1.3 Programming the Baud Rate
The baud rate is programmed by setting values in two registers. Each bit period is divided into between 16 and
31 samples. This number is determined by adding 16 to the value set in
SM
of the
mode control register
(see
Table 176 on page 193)
. The sample period is determined by multiplying the input clock period by the value in the
baud rate register
+ 1. These two values, when multiplied together, are as close as possible to the ideal number of
clocks per bit for the desired baud rate.
The input clock for the ACCs on the IPT_
ARM
is the system clock. The maximum and default baud rate for the ACC
(IrDA and UART) transmit and receive data is 115.2 kHz. The input clock is divided by 500 to achieve this exact
baud rate. The number of sample clocks could be selected as 25, programmed as 9 (see bits 7:4
of the mode con-
trol register
in
Table 176 on page 193
), and the
baud rate register
could be selected as 19, to set the clock divider
to 20.
Mode: Bit 0 of Mode
Control Register
0
0
0
0
1
1
1
1
Parity Control: Bits[4:3] of
Transmitter/Receiver Control Register
00
01
10
11
00
01
10
11
Resulting Transfer
1 start, 8 data, 1 stop bit.
1 start, 8 data, 2 stop bits.
1 start, 8 data, 1 even parity, 1 stop bit.
1 start, 8 data, 1 odd parity, 1 stop bit.
1 start, 9 data, 1 stop bit.
1 start, 9 data, 2 stop bits.
1 start, 9 data, 1 even parity, 1 stop bit.
1 start,
9
data, 1 odd parity, 1 stop bit.
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| T8502 | T8502 and T8503 Dual PCM Codecs with Filters |
| T8503 | T8502 and T8503 Dual PCM Codecs with Filters |
| T8531A | T8531A/8532 Multichannel Programmable Codec Chip Set |
| T8531 | T8502 and T8503 Dual PCM Codecs with Filters |
| T8532 | T8502 and T8503 Dual PCM Codecs with Filters |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| T8302A | 制造商:MOLEX 制造商全稱:Molex Electronics Ltd. 功能描述:Terminator Die |
| T8302B | 制造商:MOLEX 制造商全稱:Molex Electronics Ltd. 功能描述:Terminator Die |
| T8302F | 制造商:MOLEX 制造商全稱:Molex Electronics Ltd. 功能描述:Terminator Die |
| T8303A | 制造商:MOLEX 制造商全稱:Molex Electronics Ltd. 功能描述:Terminator Die |
| T8303ABNAD | 制造商:Arcolectric 功能描述:1 Pole Miniature push button(with light) |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。